

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于双视场激光雷达的气溶胶水平分布观测
[王界1, 2, 3  , 刘文清
, 刘文清1, 2 , 张天舒1, * , 万学平3 , 高洁3 , 李岭3 , 马娜3 ]
, 刘文清, 万学平|
|


作者简介: 王 界, 1986年生, 中国科学院安徽光学精密机械研究所中级工程师 e-mail: jiewang@aiofm.ac.cn
在自主研制的便携式双视场米散射气溶胶激光雷达(DFOV激光雷达)基础上, 探索双视场激光雷达信号拼接思路, 利用“斜率-Fernald”方法反演了气溶胶水平消光系数, 进而获取了DFOV激光雷达对气溶胶水平消光系数的扫描分布。 首先, 对雷达回波信号分段运用斜率法, 求解最优的气溶胶消光系数、 后向散射系数以及相对应的参考距离, 然后将该参考点处的后向散射系数代入“Fernald方法”的前后向积分解中, 进而得到整条廓线的消光系数。 该方法有效避免了“斜率法”中大气均匀的前提假设和消光系数负值的问题, 也有效避免了“Fernald方法”对参考点的限制和要求。 在获取水平消光系数后, 通过拟合近地面空气质量监测点位过顶时刻DFOV激光雷达测量的气溶胶消光系数与PM10质量浓度 ρ(PM10)之间的关系, 相关性达到0.91。 将此定量关系传递至激光雷达扫描的消光系数结果中, 可得到气溶胶质量浓度的水平分布, 定量反演大气中颗粒物的分布, 用于研究近地面大气污染成因、 机理和污染来源分析, 为DFOV激光雷达进一步应用于城市区域大气污染定量评价和区域空气质量三维模式同化分析研究提供定量的数据支撑。
The three-dimensional (3D) distribution of aerosol was realized based on a home-made dual field of views (DFOV) Mie lidar system. The effective combination method of backscattering signals from the two telescopes was explored to retrieval the aerosol mapping. To implement the lidar mapping of the near-surface aerosol density distribution, a combination of the widely adopted and well-elaborated method of Fernald and the slope method was used. In this combination, the slope method was applied to determine the aerosol extinction and backscattering coefficients in appropriate parts of the lidar beam path. Subsequently, the values of backscattering coefficients of aerosol obtained here were used in retrieving the whole range profiles of extinction coefficients by means of forward- and backward-integrations in the Fernald solutions. As a result, the lidar range profiles of the aerosol extinction coefficients were retrieved with relatively high precision and reliability. In this manner, the advantages of these two approaches are synergistically combined with avoiding priori assumption of atmospheric condition and the reference point, respectively. Then an ideal quantity relationship between the particulate matter mass concentration ( ρ(PM10)) and aerosol extinction coefficients was given through a nonlinear fitting with ρ(PM10) monitored by an air quality station (AQS) and the overhead extinction coefficient scanning by DFOV lidar. The fitting Pearson Coefficient was 0.91. The mass concentration density field of aerosol was mapped continuously and online through applying the fitting formula. This quantity study established a foundation for the city-cluster’s air pollution evaluation and the regional 3D air quality model assimilation.
气溶胶在垂直方向的分布导致能量分布垂直梯度变化, 影响城市(群)大气边界层的演变和垂直扩散条件的改善, 会导致大气复合污染的形成与恶化[1, 2, 3, 4]。 由于水平分布差异, 不同种类的气溶胶(例如二次气溶胶、 沙尘、 浮尘、 烟粒等)产生的跨界输运, 也是导致区域大气污染的重要原因[5, 6, 7]。 激光雷达是探测大气中分子或气溶胶物理结构的一种全天候工作的主动遥感技术。 较地面的大气污染监测手段, 激光雷达可以识别几公里范围内的气溶胶分布信息, 具有高时空分辨率的特点[8, 9, 10]。 激光雷达在观测时通常采用单视场接收雷达回波信号, 无论接收视场的光轴是否与光源共轴, 均会由于“ 几何因子” 的原因产生激光雷达盲区和过渡区, 此类区域有时达到数百米, 对于评价近地面大气污染物分布较为困难, 因此更大程度地降低盲区和过渡区成为近年来激光雷达领域的研究重点之一[11, 12, 13, 14, 15]。 现有的米散射激光雷达较多用于获取气溶胶的垂直分布特征, 对于城市内污染源水平排放特征观测数据较少[16, 17, 18]。 本研究采用双视场的米散射激光雷达技术, 通过搭载扫描云台, 可以近乎无盲区地获取气溶胶的水平消光系数分布。 通过地面数据的订正, 可以给出气溶胶质量浓度较为准确的水平分布, 有利于研究城市大气污染的成因、 机理和来源。
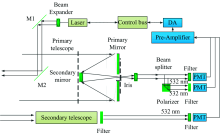
DFOV激光雷达系统结构如图1所示。 激光器发射线偏振激光束, 经扩束镜和45° 反射镜后进入主望远镜, 经第二个45度反射镜后与主望远镜同轴发射, 回波信号经过主望远镜中的主反射镜、 次反射镜、 小孔光阑、 透镜后, 准直经过分光器, 由两个探测器检出激光雷达系统中远场的水平回波分量和垂直回波分量, 用于解析气溶胶的偏振形态。 近场信号由次望远镜接收进入光电倍增管。 两个望远镜接收到的三个通道的信号经过放大器后, 由数据采集卡采集解析。
 | 图1 DFOV激光雷达系统结构Fig.1 System framework of the DFOV lidar |
DFOV激光雷达的光源采用美国Cobolt生产的工作主波长为532 nm的固体脉冲激光器, 单脉冲能量约60 μ J, 重复频率2~7 kHz, 经10倍光学扩束准直后激光束的发散角为0.83 mrad。 主望远镜接收直径150 mm, 接收视场角2.5 mrad。 次望远镜接收直径30 mm, 接收视场角6.1 mard。 主望远镜与次望远镜之间的距离是25 mm, 两个接收视场的光轴夹角是0.2° ~0.4° 。 受光学设计、 安装调试的影响, 每台激光雷达的夹角会不尽相同。 探测器采用光电倍增管(PMT), 在可见光波段的量子效率大于45%, 数据采集卡的采集频率20 MHz, 瞬态时间为2.7 ns, 雷达空间分辨率为7.5 m。
为使DFOV激光雷达系统在水平方向转动扫描, 在设计三维扫描云台时需要考虑以下几个关键因素: (1) 承载能力和平台力矩匹配。 (2) 云台自动化控制, 实现不同扫描角度、 不同扫描范围、 不同步进角度的灵活编码。 (3) 云台旋转过程中震动频率小, 以降低激光雷达系统噪音。 (4) 防护等级适应于室外各种天气条件下的工况工作。 此系统搭载的三维扫描云台设计的最大承载重量是50 kg(此实验中雷达主机重量30 kg), 主传动部分采用蜗轮蜗杆方式传动, 云台内部安装工业级嵌入式控制电子系统, 可以实现激光雷达在水平0° ~360° 范围内以0.01° ~20° · s-1的转动速度, 俯仰-90° ~90° 范围内以0.01° ~6° · s-1的转动速度调节。 由于雷达应用于垂直观测条件下的气溶胶廓线反演相对成熟, 重点针对激光雷达在水平低角度(或0度仰角)的气溶胶探测。
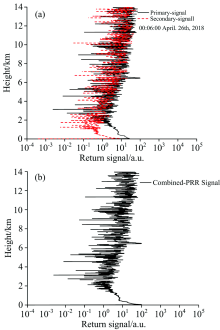
利用DFOV激光雷达反演气溶胶水平水光系数时, 需要对激光雷达方程求解[19], 需要分两步进行: 第一步, 要对DFOV激光雷达主副视场信号的拼接, 获取整个视场的雷达回波信号。 由于主副视场独立探测和接收雷达回波信号, 信号强度和信号特征在远近场是有差异的, 其中主视场可以对远场(大于1 km的区域)有较高的信噪比, 而副视场对近场(小于1 km的区域)有较高的信噪比。 以早晨6时的主副视场雷达回波信号为例[如图2(a)], 主视场接收的信号(黑色实线)在高空的信噪比较高, 可以观测到6.45 km处的云层分布。 而副视场的信号在高空的表现相对较弱, 但近场1 km左右的信号平滑度要优于主视场信号。 经仔细筛选, 选取0.3~0.45 km范围进行两条信号的拼接, 在此拼接区间内, 主副视场回波信号强度的线性比率为11.29(标准偏差0.34), 线性度较好。 拼接后的DFOV雷达回波信号如图2(b)所示。 在DFOV激光雷达连续观测运行时, 每一时刻主副视场回波信号的拼接区间选择是不确定的, 需要对拼接区间的线性度进行评价, 动态调整拼接区间, 但拼接区间一般在200 m~500 m之间。
 | 图2 DFOV激光雷达主副视场独立信号(a)及双视场拼接信号(b)Fig.2 Separate return signals of primary FOV (black-solid line) and secondary FOV (red-dash line) (a) and the combined return signal (b) of DFOV lidar |
第二步, 在获取了完整的雷达回波信号后, 需要对方程进行数值求解。 一般在获取气溶胶消光系数垂直剖面时常用的方法包括Collis斜率法[20]、 Klett算法[21]和Fernald算法[22]。 上述方法运用于气溶胶水平观测时存在不足: 斜率法是基于水平路径上大气均匀分布的前提假设, 在实际大气中, 尤其当有不均匀的污染源分布时, 不能保证任一时刻、 任一位置均成立。 运用斜率法求解气溶胶水平分布还会面临消光系数反演负值的问题, 即当遇到强的气溶胶团(例如烟羽)分布, 雷达回波距离平方校正信号在该气溶胶强峰的峰后下降区域斜率为负值, 反演得到的消光系数为负值, 这与实际情况不符。 但斜率法在应用时较为简单, 无需考虑激光雷达比和激光雷达路径中的气溶胶的物理特性, 并且较多情况下可以获取激光路径上消光系数的解析解。 Klett法和Fernald法在求解雷达方程时, 须假定气溶胶后向散射系数与消光系数之间的定量关系, 同时需要明确参考点Zc以及在此参考点处大气气溶胶和大气分子的光学参量, 这在气溶胶水平探测时较难直接获取。 本工作尝试将斜率方法和Fernald方法联用来求解水平气溶胶的分布, 简称“ 斜率-Fernald” 方法。
“ 斜率-Fernald” 方法反演水平消光系数的流程: (1)根据信噪比阈值在信噪比廓线中确定初始距离Zi。 (2)将激光雷达回波信号有效区域的初始距离Z0至初始距离Zi区间进行分段, 分段区间1: 从Z0至(Z0+Δ z); 分段区间2: 从(Z0+δ z)至(Z0+Δ z+δ z), 以此类推, 分段区间n: 从[Z0+(n-1)δ z]至[Z0+Δ z+(n-1)δ z], 其中, Δ z为区间步长, δ z为激光雷达的空间分辨率。 在每一个分段区间内运用斜率法解析气溶胶的消光系数, 同时获得该分段区间的线性相关性因子。 在计算完所有分段区间后, 最优相关性因子所对应的气溶胶消光系数值和该参考距离Zf代入Fernald方法的前后向积分结果中[22], 求解整条气溶胶消光系数廓线。 分段区间的步长选择与激光雷达的空间分辨率有关。 若δ z较高, Δ z选择较大; 若δ z较低, Δ z选择较小。 在下面的观测实验中, 选择分段区间的步长是10δ z, 即75 m。 同时, 在利用Fernald方法计算消光系数时, 假设532 nm激光波长对应的气溶胶后向散射比是50 sr。
气溶胶质量浓度的水平分布对于评价颗粒态污染物的区域分布及对人类生活的影响至关重要, 也是区域空气质量三维模式同化数据源之一。 目前用于监测大气中的可吸入悬浮颗粒物质量浓度ρ (PM)是依靠称重法、 吸收法或光散射方法进行定点抽取测量, 该类技术获取的可吸入颗粒物质量浓度仅能表征采样点一定范围的污染程度。 利用激光雷达扫描半径3~5 km范围, 连续获得30~80 km2内气溶胶的水平分布, 对定量研究近地面大气污染的成因、 机理十分有利。 但是, 激光雷达直接测量的是气溶胶的消光系数, 而非颗粒物质量浓度ρ (PM10), 二者之间需要相关性较好的拟合关系。 在实验中, 可以将空气质量监测点位设置在激光雷达有效观测区域内, 通过拟合激光雷达过顶空气质量监测点位时消光系数与过顶时刻的ρ (PM10)的关系, 便可以获取整个扫描区域的ρ (PM10)分布。 理论上, DFOV激光雷达测量的气溶胶消光系数与PM10质量浓度ρ (PM10)之间存在着如式(1)非线性关系
式(1)中, κ , ζ 和C是拟合的系数, ρ (PM10)的单位是μ g· m-3, α a的单位km-1。
2018年3月29日— 31日, 将DFOV激光雷达架设在山东省济宁市微山县韩庄镇小学楼顶, 对该镇周边半径5 km范围内的污染物分布进行扫描监测(如图3, LS)。 雷达距地面高度约22 m, 水平扫描仰角固定值0° , 如图3(b)。 激光雷达扫描范围内, 距雷达北偏东30° , 272 m处, 有济宁市空气质量监测点位— — 韩庄镇站点[如图3(a), AQS]。 该站点位于韩庄镇政府院内, 全天候连续在线监测SO2, NO2, CO, O3, PM2.5和PM10的质量浓度。 AQS的采样高度距离地面17 m, 颗粒物质量浓度的测量是采用国家标准方法— — 振荡天平法测量。
 | 图3 DFOV激光雷达与空气质量监测点位布局(a)和雷达观测照片(b)Fig.3 Locations lidar station (LS) & air quality station (AQS) (a) & Field picture of DFOV Lidar (b) |
韩庄镇位于山东省最南部苏鲁交界处, 该镇离104国道最远直线距离约1.3 km, 京杭运河和京沪铁路贯穿全境。 在雷达点位正西是微山湖, 湖水面积约660 km2。 站点正南方约2~3 km处, 分布有徐州东南钢铁、 利国钢铁、 东亚钢铁、 徐州伟天化工、 东兴能源、 龙山水泥厂、 徐州成钢集团等工业源。 站点北面和东面以农村农田为主, 无明显污染物排放源。
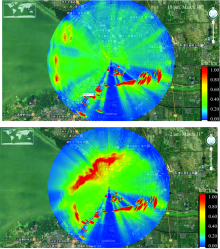
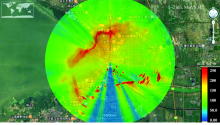
3月29日下午14时至31日上午7时, DFOV激光雷达对站点周边进行连续水平扫描。 扫描过程中激光雷达的脉冲重复频率设置为7 kHz, 单条廓线累加150 000次, 单条廓线扫描角度分辨率2° 。 由于扫描角度分辨率、 脉冲叠加次数影响, 通常扫描一周气溶胶分布持续约1.5 h。 将扫描得到的消光系数随水平距离的分布与高清的GIS地图信息叠加, 可清晰、 精确地识别气溶胶的分布位置。 选取30日18时[图4(a)]和31日凌晨2时[图4(b)]的扫描结果, 发现在扫描范围内, 雷达对气溶胶团的轮廓、 强度监测的较为清晰, 信噪比较高。 对比这两个时刻, 站点周边的污染团有迁移和扩散的过程, 30日晚间污染主要分布在雷达站点西南、 南部、 东南部和西部湖面上, AQS站点处的颗粒物质量浓度ρ (PM10)是83.1 μ g· m-3, 对应的气溶胶的消光系数是0.334 km-1。 凌晨2时左右, 雷达站点西南部的污染增强, 南部和东南部的污染分布继续保持, 而西部和北部的污染带出现增强, 并影响到AQS站点数据, ρ (PM10)增大至135 μ g· m-3, 站点过顶的气溶胶消光系数增大至0.53 km-1。
 | 图4 30日18时(a)和31日2时(b)气溶胶消光系数水平分布Fig.4 Lidar mapping of aerosol extinction coefficients at 18 pm, 30th (a) and 2 am, 31st (b) |
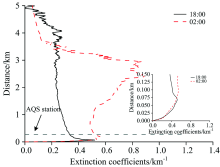
为比较不同时刻消光系数的特征, 选取经过空气质量监测站点时刻的激光雷达测量得到的消光系数水平廓线, 分别对应于30日18时34分和31日2时4分, 对比如图5所示。 30日18时污染团没有经过AQS站点, 整个水平路径上的消光系数低于0.4 km-1, 并且水平分布的差异较小。 凌晨2时, 污染团经过AQS站点时, 消光系数增强了60%(图5中虚线的交点所示)。 该污染团分布的范围较广, 造成水平区域0.8~3.5 km范围内的气溶胶分布明显增多, 尤其在2.5~3.2 km左右, 气溶胶分布强度最大, 消光系数接近0.9 km-1。 从图5中也可以看出, 扫描雷达水平观测时, 基本上消除了盲区, 过渡区接近67.5 m。 该过渡区尚未经过雷达“ 几何因子订正” 。
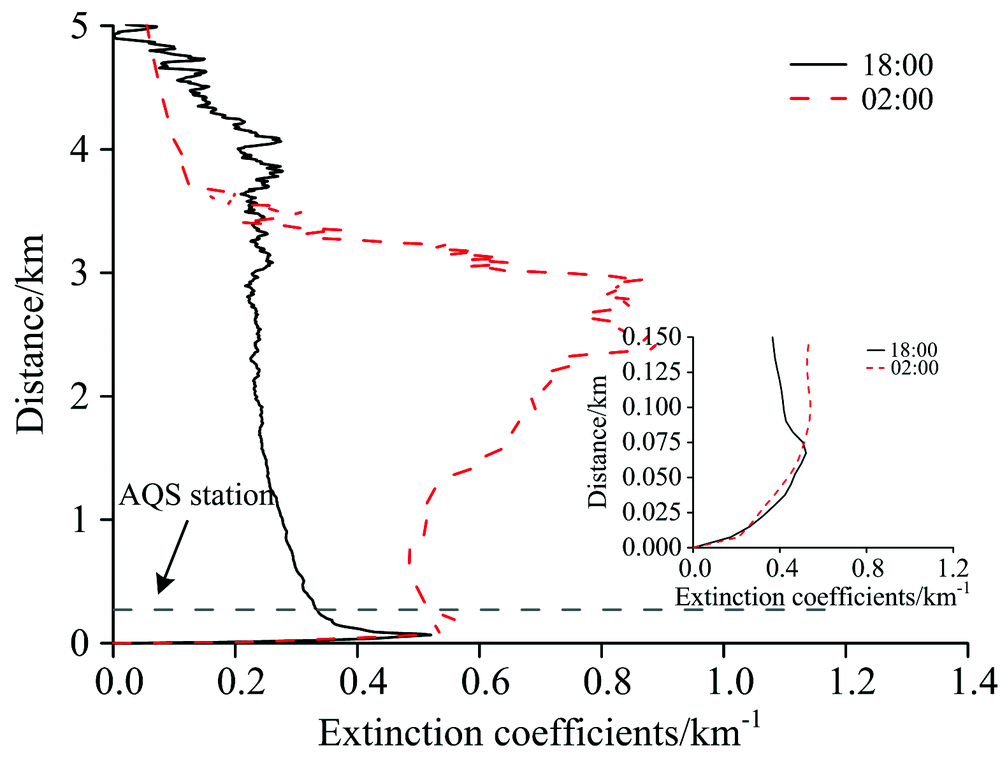 | 图5 不同扫描时刻的消光系数廓线 黑色实线: 18时; 红色虚线: 2时Fig.5 Extinction coefficient profiles black-solid line:18 pm; red-dash line: 2 am |
DFOV激光雷达在水平连续扫描时, 可以动态获取水平气溶胶的分布、 变化过程。 在观测期间, DFOV激光雷达共连续扫描了30周次的污染分布。 选取这30组激光雷达过顶AQS站点时刻ρ (PM10)和消光系数的对比如图6所示。 通过式(1)的拟合, 得到参数κ =148.85, ζ =0.4和c=11.62μ g· m-3。 相关系数r=0.91。 将拟合参数代入式(1), 传递至激光雷达测量的消光系数结果中, 可将气溶胶消光系数的水平分布转换为颗粒物质量浓度的水平分布。 以凌晨2时的观测结果为例, 计算后的ρ (PM10)的水平扫描分布如图7所示。 在图7中, 发现颗粒物质量浓度高值区域与激光雷达监测的气溶胶消光系数强度分布有很好的一致性。
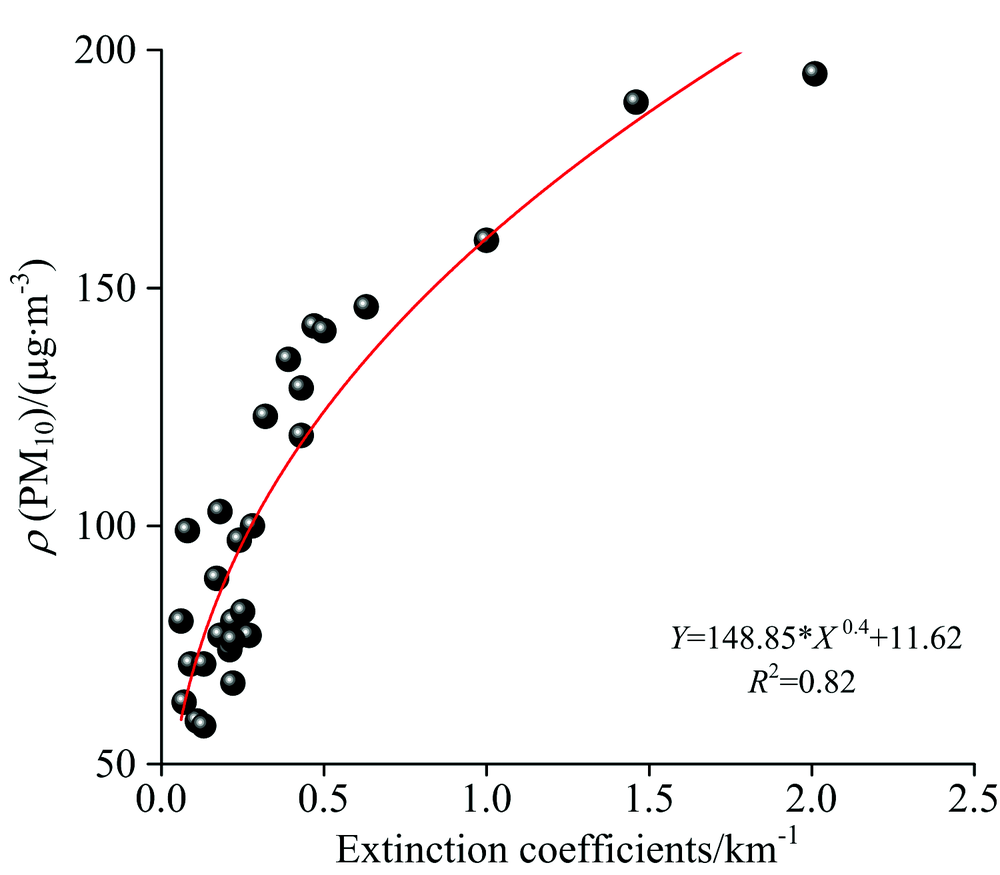 | 图6 DFOV激光雷达消光系数与ρ (PM10)的相关性Fig.6 Fitting with extinction coefficients of DFOV and ρ (PM10) |
 | 图7 ρ (PM10)的水平分布DFOV雷达监测结果(半径5 km)Fig.7 DFOV lidar mapping of horizontal ρ (PM10) field with radius of 5 km |
由于雷达水平测量的高度与AQS站点颗粒物质量浓度采样一致, 雷达覆盖的范围内大气的温度、 湿度基本稳定分布, 因此通过AQS站点数据可以有效订正激光雷达扫描范围内的颗粒物质量浓度分布, 并且参与订正的地面空气质量站点的数据越多, 获取的颗粒物质量浓度分布越准确。 参与拟合的空气质量监测点位的ρ (PM10)是小时均值, 而选取的消光系数是激光雷达过顶时刻消光系数瞬时值, 这是拟合误差的重要来源之一。
通过获得的半径5 km范围内的ρ (PM10)水平分布, 可以定量反演大气中颗粒物的分布, 用于研究近地面大气污染成因、 机理和进行污染来源分析。 将水平分布的颗粒物质量浓度数据代替孤立空气质量监测点位数据同化到区域空气质量模式中, 可进一步提高空气污染的预警预报精度, 这将再下一步的研究工作中开展。
通过双视场便携式米散射气溶胶激光雷达的研制, 可以实现气溶胶的水平特征扫描监测。 在探索双视场激光雷达信号拼接的基础上, 利用“ 斜率-Fernald” 方法反演气溶胶水平消光系数分布。 该方法有效避免了“ 斜率法” 水平均匀分布的前提假设和消光系数负值的问题, 也避免了纯粹“ Fernald方法” 对参考点的限制和要求。 在获取水平消光系数后, 通过与近地面空气质量监测点位的PM10质量浓度ρ (PM10)比较, 获得较好的非线性拟合关系。 通过该拟合关系, 可反演气溶胶的质量浓度水平分布, 为DFOV激光雷达应用于水平污染排放的监测和大气污染评价研究提供定量的数据支撑。 工作中需要进一步研究多个空气质量监测点位同时订正激光雷达颗粒物质量浓度分布时精度的改善, 进而尝试将经过统一比对订正后的多台DFOV激光雷达应用于区域组网观测, 既可以获取城市(群)区域尺度内气溶胶的水平污染传输定量评价, 又为区域空气质量三维模式同化提供更高精度的数据源。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|