
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
高光谱遥感分区混合端元提取计算海洋溢油覆盖度
[韩仲志1  , 王轩慧
, 王轩慧1, 2 , 时鸿涛1 , 万剑华3, * ]
, 王轩慧]
|
|


作者简介: 韩仲志, 1981年生, 青岛农业大学理学与信息科学学院副教授 E-mail: hanzhongzhi@qau.edu.cn
溢油覆盖度的估测是海洋溢油探测与灾害评估的重要内容, 受航空航天传感器地面分辨率的限制, 准确探测溢油覆盖度比较困难。 在海洋风浪及破碎波作用下, 溢油往往呈条带状分布。 获取的高光谱数据中存在大量的油、 水混合像元; 传统图像分割方式计算溢油面积存在偏差, 且受传感器角度、 高度等影响, 光谱变异明显, 传统端元提取方法很难找到纯像元光谱。 提出了一种通过分区混合端元计算海洋溢油覆盖度的探测方法。 首先对影像进行分区并使用N-FINDR算法进行端元预选; 然后再利用独立分量分析(ICA)方法进行端元精选, 按照负熵最大输出得到候选端元, 并将地面同步参考光谱作为约束引入相似性溢油端元识别; 最后基于非负矩阵分解方法(NMF)求取端元丰度, 通过太阳耀斑区的修正, 得到真实的溢油覆盖度。 分区混合端元的提取较好的解决了全局端元变异及环境适应性差的问题, 使精选后的端元具有更好的环境鲁棒性。 为更好地衡量该算法精度, 采用仿真数据与真实高光谱影像数据相结合进行实验验证。 仿真实验中, 人工设定溢油丰度, 使用均方根误差(RMSE)和丰度估计误差对比评估估计丰度与设定丰度之间的差别, 并设计了算法适应性和抗噪实验。 结果表明采用MNF和ICA两种高光谱压缩方法, 丰度估计误差均低于3%, 重构图像的最小均方根误差RMSE最高为0.030 6, 且具有较好的抗噪能力, 验证了该算法的有效性。 真实实验中, 使用2011年山东长岛溢油8景机载高光谱影像数据为真实测试数据, 由于真实遥感数据往往缺失地面同步丰度数据, 导致对算法精度进行评价比较困难, 使用仿真数据交互验证与目视解译数据相结合的方法进行精度评价, 通过耀斑区修正后估测的机载高光谱成像总的溢油覆盖面积为1.17 km2, 溢油覆盖度为22.85%, 与现场人工估测面积偏差为2.15%, 明显高于传统方法。 受海洋破碎波、 光谱变异性影响, 和航空航天遥感器地面分辨率的限制, 海洋溢油遥感中单个像元进行丰度解析是一个难题。 基于亚像元丰度分解思想, 讨论了海洋溢油覆盖度的问题, 提出一种较为完善的海洋溢油覆盖度的计算办法, 通过仿真数据和实际的高光谱溢油数据进行了方法的验证, 实现了较为客观的自动化溢油覆盖度(丰度)探测方法, 可以较为准确的估测海洋溢油的覆盖度, 对溢油遥感面积的业务化探测具有积极意义。
How to estimate the coverage rate of oil spills is an important part of the sea oil spills detection. To be limited by spatial resolution of airborne hyperspectral remote sensing image, it is difficult to detect the coverage of oil spills accurately. Under the action of ocean waves and broken waves, the oil spill tends to be banded distribution. Because there are a lot of oil and water mixed pixels in the hyperspectral data, the traditional image segmentation method which is used to calculate the oil spill area was mistaken in many ways. It is difficult to find the pure spectral spectrum because the traditional extraction method is influenced by the angle and height of the sensor and the spectral variation. In this paper, we proposed a second extraction method of endmembers. Firstly, N-FINDR algorithm is used for the endmembers’ preselection. Secondly, the Independent Component Analysis (ICA) is used for the ultimate refinement of endmembers’ selection and the candidate endmembers are obtained according to the maximum output of negative entropy. Thirdly, the ground synchronous reference spectra are used as constraints to identify the similar oil spill terminals. Finally, the end members’ abundances are obtained based on the nonnegative matrix decomposition method (NMF) and the real oil spill coverage are obtained through correction of solar flare region. The extraction of partitioned mixed endmembers is a good solution to the problem of global endmembers mutation and poor environment adaptability, so that the selected endmembers have better environment robustness. In order to evaluate the accuracy of this algorithm, the simulation data and the real hyperspectral image data are combined to verify the experiment. In the simulation experiment, the difference between the estimated abundance and the set abundance are evaluated by using the mean square error (RMSE) and the abundance estimation error, the algorithm adaptability and anti-noise experiment are designed. The result indicated that, under two hyper-spectral compression case by MNF and PCA, estimation error of abundance is less than 3%. The minimum RMSE of reconstructed image is up to 0.030 6 and has good anti-noise ability. The accuracy evaluation results verify the effectiveness of the proposed algorithm. In the real experiment, 8 hyper-spectral remote sensing image collected by airborne of Shandong Changdao in 2011 are used for real test data. Because the real remote sensing data often lacks the ground synchronization abundance data, it is difficult to evaluate the accuracy of the algorithm. The combination of simulation data with verification and visual interpretation data are used to evaluate the accuracy. The total oil spill coverage area of airborne hyperspectral imaging estimated by the flare area is 1.17 km2, the oil spill coverage is 22.85%, and the field artificial estimation area deviation is 2.15%. Obviously the method is superior to the traditional method. It is difficult to analyze the abundance of single pixel in ocean oil spill remote sensing because it is influenced by the ocean breaking wave, spectral variability and the limitation of ground resolution of aerospace remote sensor. Based on the idea of the abundance decomposition of the image, this paper discusses the problem of the coverage of ocean oil spill, and puts forward a comparatively perfect method for calculating the covering degree of ocean oil spill. The method is validated through the simulation data and the actual hyperspectral oil spill data. The method is an objective automatic oil spill coverage (abundance) detection method and could realize the automatic monitoring of oil spill coverage rate. It is meaning for fine detection of oil spills area.
近年来, 海洋溢油事故频发, 及时准确地对海洋溢油覆盖面积进行精细探测, 采取合适的应急响应并灾害评估, 是一项复杂而具挑战性的工作[1, 2]。 目前, 业务化探测中依然通过传统的人工目视解译方法为主, 估测溢油的覆盖度自动化程度低, 客观性差。 多种遥感技术[3, 4, 5]作为快速的地物探测手段, 已广泛应用于地物探测中, 近年来发展起来的高光谱遥感技术在国内外溢油检测系统中逐步扮演重要角色, 以MODIS为代表的卫星高光谱遥感在墨西哥湾溢油中发挥了重要作用[6, 7], 机载AVIRIS航空高光谱遥感已应用于大连新港溢油探测中[8]。 相对于传统图像遥感技术, 高光谱技术具有图谱合一的优点, 能够对地物进行较为精确的图谱解析, 在溢油场景中能够分辨溢油区与假溢油区域, 甚至能识别溢油种类和油膜厚度。
目前对溢油面积的估算主要使用图像处理手段对油膜边界进行图像分割, 进而推算溢油面积[7, 8], 该方法对连片大面积溢油探测具有一定效果。 由于航空航天传感器地面分辨率的限制, 在风浪及海洋破碎波作用下, 溢油往往是条带状分布的破碎条纹, 获取的高光谱数据往往是油、 水的混合像元, 图像分割方式存在偏差。 对单个像元, 充分利用数据的高光谱分辨率, 估测真实的油、 水混合程度, 进而精细推算出实际的溢油面积, 国内外鲜有文献报道。
在海洋溢油场景中, 高光谱获得的像元可能是纯油像元、 纯水像元或者是油水的混合像元, 在风浪和破碎波的作用下, 油水混合像元广泛存在。 在陆地遥感中, 广泛应用亚像元分解方法来估测实际的地物丰度[9], 实际操作中首先要获取地物类型对应的纯像元光谱, 解决的方法有两个, 一是使用传统的地面同步数据踏勘获得光谱端元[10], 由于地面踏勘数据极难获得, 需要耗费巨大人力物力, 近年来发展了以N-FINDR算法[11]为代表的从遥感影像中直接提取端元的方法, 实现了丰度解析的自动化, 然而由于传感器角度环境、 采集不同, 提取的全局端元光谱误差较大。 实际高光谱图像中, 由于噪声的影响及邻近地物类别的光谱相似性, 同一类别像素在高维空间并没有呈现理想化的紧密团聚。 此外, 在进行地物同步光谱测量中, 由于地面实测光谱环境与航空探测环境的差异, 使得地面光谱不能准确反映航空光谱, 从航空遥感图像上寻找的端元可能并不是地面测得的端元光谱。
针对传感器地面分辨率限制和地物光谱的变异性, 提出了一种通过分区混合端元计算海洋溢油覆盖度的探测方法, 首先通过影像分区和二次端元提取, 提取更为稳健的溢油端元, 然后基于非负矩阵分解方法求取端元丰度, 最后通过太阳耀斑区的修正, 得到真实的溢油覆盖度。 同时通过仿真数据和山东长岛溢油的真实数据对算法的精度进行了评价。
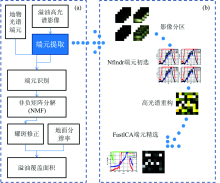
本文方法是一种基于混合端元提取的丰度约束NMF溢油覆盖度(丰度)计算方法。 这里的丰度也就是溢油端元的空间分布情况。 以往的遥感溢油面积受到遥感分辨率的影响, 不能准确估计一个像元内溢油与海水的分布比例。 本方法充分考虑到了地物遥感和航空遥感的差异性, 能够在一定程度上避免虚警端元的影响, 而且能够详细计算在一个像素内(代表海面上一个区域)的溢油所占的面积比例。 其流程图如图1所示。
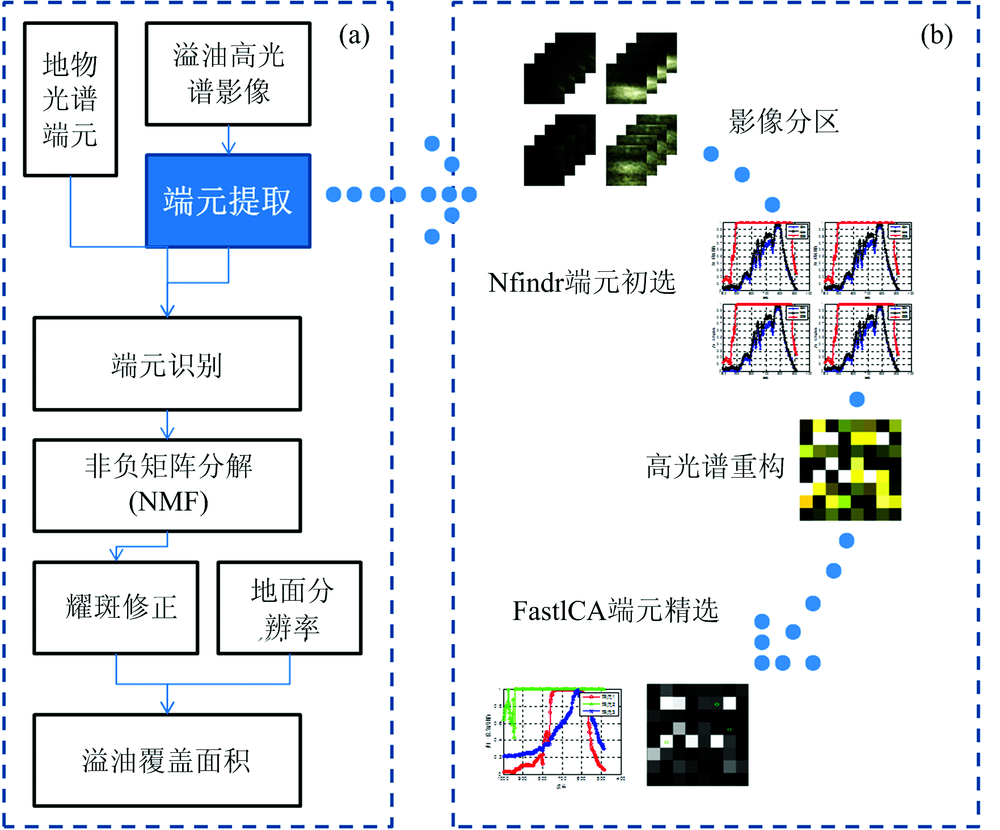 | 图1 溢油覆盖度检测方法流程图Fig.1 Flow chart of oil spill coverage rate detection |
分区混合端元提取算法其主要步骤如算法1所示。
算法1: 分区混合端元提取算法(sub-quadratic mixture end-member extraction method)
输入: 高光谱影像; 分区栅格数: m← 4; 提取次数: n← 2; 地面分辨率(dpi); 地面参考光谱
输出: 溢油覆盖度(%); 覆盖面积(km2)
Step1: 对每一景高光谱图像进行m个栅格的栅格分区, 满足现象混合模型[10];
Step2: 使用N-FINDR算法[11]对m个子区进行端元提取, 每个分区得到p个端元r1, r2, …, rp为候选端元
Step3: 重复step 2, 遍历所有高光谱影像, 获得候选端元重构高光谱数据块;
Step4: 使用FastICA方法[12, 13]对重构高光谱数据寻找相互独立的端元, 并按照负熵最大输出
Step5: 使用光谱相关系数等[16]计算测量光谱与候选端元的相似性, 确定最终端元
Step6: 使用非负矩阵分解NMF[14]计算各个端元的丰度, 对X=AS+n, 利用最大似然估计非负的A与S。
Step7: 根据地面分辨率和溢油端元的丰度折算溢油实际覆盖面积。 方法为: 实际覆盖面积=地面分辨率2× 丰度× 像素点数。
Step8: 太阳耀斑区域溢油面积的估算, 将耀斑区的溢油区域按照概率进行划分。
采用下面两个指标评价精度:
(1)均方根误差(root mean square error, RMSE)[17]可用来评价两幅图像的相似性。
其中, S为测算的端元丰度矩阵, Z为真实丰度矩阵。
(2)丰度估计误差
其中, m为混合光谱的条数, n为端元个数, qij是第i条光谱第j个端元的计算丰度值; pij是第i条光谱第j个端元的假定丰度值; fa为丰度估计误差, 丰度值是在仿真实验时设定的丰度值, 或者是真实场景中实际地面/海面踏勘获得的真实的丰度值。
真实遥感数据往往缺失地面同步丰度数据, 导致对算法精度进行评价比较困难。 为了更好地衡量本算法精度, 采用仿真数据与真实高光谱影像数据交互验证的方法进行评价。 仿真数据人为设定真实的丰度, 使用真实丰度与估计出的丰度进行对比评估, 即可检验本方法的有效性, 均方根误差和丰度估计误差可用来评价估计丰度与真实丰度之间的差别, 误差越小算法的精度越高。
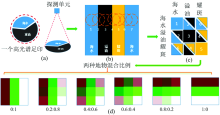
为定量评价算法性能, 首先计算机仿真生成高光谱数据, 仿真数据生成过程如图2所示。
 | 图2 仿真高光谱图像的产生策略 (a): 高光谱足印; (b): 溢油高光谱足印的位置; (c): 9宫格混合策略; (d): 设定6种丰度得到的高光谱图像Fig.2 Generation strategy of simulation hyperspectral image (a): Hyperspectral footprint; (b): The location of hyperspectral footprint for oil spill; (c): “ Nine block box” mix stratege; (d): The hyperspectral image acquired from six abundance |
海洋溢油发生时, 通过地物光谱仪裸光纤或CCD一个像素探测单元探测到的地物光谱是海面一个高光谱足印的平均光谱, 如图2(a)所示。 由于油与水的表面张力不同, 油膜会出现条带状分布, 混合的像元往往只存在于两种不同地物边界处。 海洋溢油场景的地物复杂度较低, 为简化模型, 只考虑溢油、 海水和太阳耀斑三种情况。 鉴于太阳耀斑广泛存在, 将耀斑作为一个独立的端元加以考虑。 由图2(b)分析发现, 在连片区域, 存在油、 水、 及太阳耀斑的纯像元(端元); 在边界上共有三种混合情况: 油和水、 油和耀斑、 水和耀斑。 仿真数据混合策略如图2(c)所示。 由图2(c)可以看出, 这里用到的两种端元是随机从三种端元选出的两种, 包含六种混合像元和三种纯像元。 三种端元混合产生一个9宫格的图像块, 这里设定每个小格为50× 50个像素, 对角线小方格为纯像元, 整个图像块大小为150× 150× 256像素, 其中256表示256个波段(400~1 000 nm)。 设定两种地物进行混合时具有不同的丰度, 混合比分别是0:1, 0.2:0.8, 0.4:0.6, 0.6:0.4, 0.8:0.2, 1:0, 共得到六种不同比例混合的高光谱数据块, 且混合比例(即丰度)满足非负约束及和为一约束; 取三波段假彩色合成(670, 560, 450 nm)如图2(d)所示, 得到六种混合模式下的高光谱仿真数据块。
仿真数据采用了三个端元, 其中溢油和海水的端元是2011年06月17号山东长岛发生溢油时, 通过ASD地物光谱仪地面踏勘实测获取的同步地物光谱数据, 太阳耀斑的端元是相同时间、 地点、 状况下通过机载高光谱成像仪获得的高光谱图像块, 手工选择太阳耀斑获取的耀斑光谱曲线。
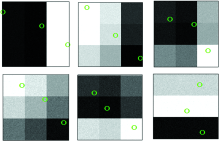
由于高光谱数据量较大, 在进行端元提取之前需要对光谱数据进行压缩。 压缩后, 信息主要集中在少数几个分量, 用压缩后数据来代替整个高光谱影像, 可有效加快算法执行效率。 采用主成分分析(PCA)和最小噪声分离变换(MNF)进行压缩对压缩后采用本方法进行端元提取, 图3是六种丰度混合比提取的端元效果, 绿色圈点表示寻找到的端元的位置, 从图3中可以看出端元提取的位置准确。
 | 图3 端元提取得到的端元位置分布Fig.3 Endmember position extracted by our method |
为考察算法的抗噪性能, 将仿真数据增加随机噪声。 噪声添加规则为: r'=r+X(u(0, 1)/SNR), 其中r和r'是增加噪声前后的光谱, u(0, 1)为随机噪声; SNR是信噪比; X是噪声的假想发射率, 这里设0.5。
图4(a)与(b)分别是对丰度混合比为0.2:0.8通过本方法提取到的三个端元的丰度图像, 以及通过提取的端元及其丰度重构的高光谱图像块。 排除噪声干扰, 重构的图像基本上保持了原始图像的绝大部分信息。
 | 图4 端元丰度及高光谱图像重构 (a): 三个端元的丰度; (b): 原始高光谱和重构高光谱Fig.4 Three endmember abundance and hyperspectral image reconstruction (a): Three endmember abundance; (b): The raw and the reconstructed hyperspectral image |
通过第1节给出的两个精度评价指标来衡量本方法的性能。 表1针对不同信噪比, 比较了六种混合比在两种压缩方法下的丰度估计误差; 表2针对不同信噪比, 比较了六种混合比在两种压缩方法下的最小均方根误差。 由表1与表2可知, 总体丰度估计误差与最小均方根误差均较小, 其中丰度估计误差最大值为2.52%, RMSE最大值为0.030 6。 精度评价结果验证了该算法具有较高精度, 数据分布比较均匀, 对噪声不敏感。
| 表1 丰度估计误差(%) Table 1 Abundance estimation error (%) |
| 表2 最小均方根误差(RMSE) Table 2 Root mean square error |
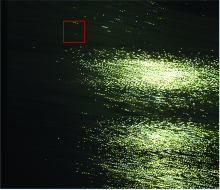
2011年6月19日, 国家海洋局北海航空支队对山东长岛溢油进行了航空高光谱数据采集, 使用海监直升机7101搭载推扫式高光谱相机。 光谱采集范围400~1 000 nm, 共采集256个波段, 飞行高度为500 m左右, 地面像元分辨率为2 m, 通过高光谱相机共获取8景高光谱影像, 以该影像数据做为真实数据源。 当天同时进行了地面同步光谱的采集, 在海面船上使用ASD地物光谱仪, 获得了30组地面踏勘实测的海水、 溢油的地物光谱。 光谱采集范围同样为400~1 000 nm, 采集256个波段, 裸光纤视场角为25° 。
 | 图5 现场获得的高光谱RGB波段合成图像Fig.5 Obtained hyperspectral image (RGB) |
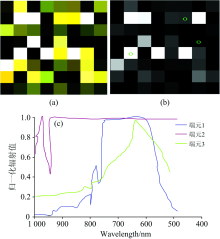
首先使用ENVI软件去掉其他地物干扰(如围油栏、 船、 油井架等)图像区域, 然后根据本方法对溢油图像进行分区处理。 图像分区的目的是避免由于飞行姿态的震动及太阳方位角等变化造成的干扰。 分别提取每个分区中的4个端元, 每景高光图像共提取端元8个, 8景图像共提取端元64个, 然后将这些候选端元重新构成一个高光谱图像[图7(a)], 进行ICA端元提取, 二次端元提取时提取4个端元。 初次端元提取时之所以取4个端元, 是为了保持端元数量有一定的盈余, 排除因为仪器噪声等造成的干扰, 然后通过地面参考光谱计算光谱相关系数, 识别确定3个端元。
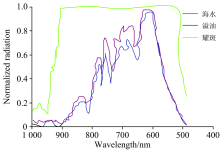
使用本方法自动提取的端元如图7(b)中绿色圈点所示, 对应图7(a)可以发现, 提取位置所在方格分别为纯白色、 纯黑色和纯黄色, 说明提取的端元较纯。 三种端元对应的光谱曲线如图7(c)所示。 由图7(b)和(c)可知, 本算法提取出来的三种端元分别为优化后的溢油、 海水和耀斑的端元。 通过计算与地面采集同步光谱的相关系数来确定对应关系, 此时, 端元3与地面溢油光谱数据的相关系数为0.78, 确定光谱为溢油的光谱。 由图6与图7(c)对比可知, 通过机载传感器提取的端元与地物光谱仪同步获取的端元还是存在一定的差别(相关系数不为1), 产生这种差别的原因是采集环境的不同造成的。 机载传感器受到海况特别是海雾的影响较大, 因此有必要用地面同步数据作为参考信号去对机载传感器提取的端元进行类型判别。
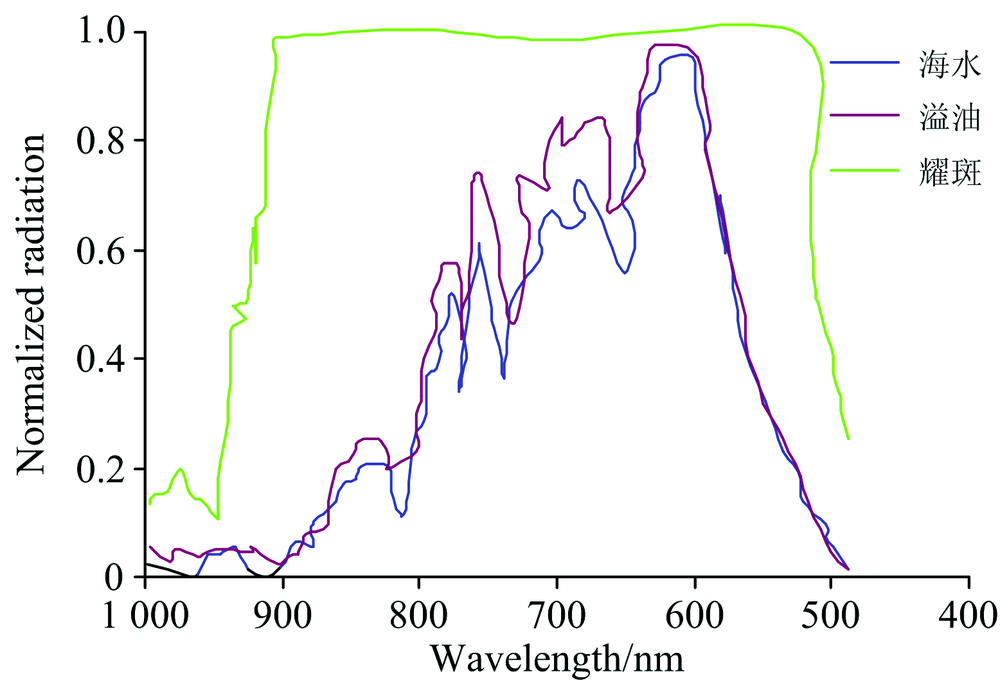 | 图6 三种端元波谱Fig.6 Three endmember spectra |
 | 图7 本方法获得的端元 (a): 一次提取的端元; (b); 二次提取的端元; (c): 提取的端元波谱曲线Fig.7 The Endmember obtained by this method (a): The first extraction of endmember; (b): The second extraction of endmember; (c): Extracted endmember spectral curve |
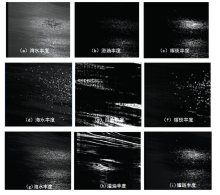
目前常规的端元提取方法有两种, 一种是通过地面踏勘直接使用ASD地物光谱仪实测端元光谱[9], 另外一种是通过N-FINDR算法提取全局端元。 为了验证本方法的有效性, 图8分别是ASD(第一行)、 N-FINDR(第二行)和本方法(第三行)得到丰度效果图。
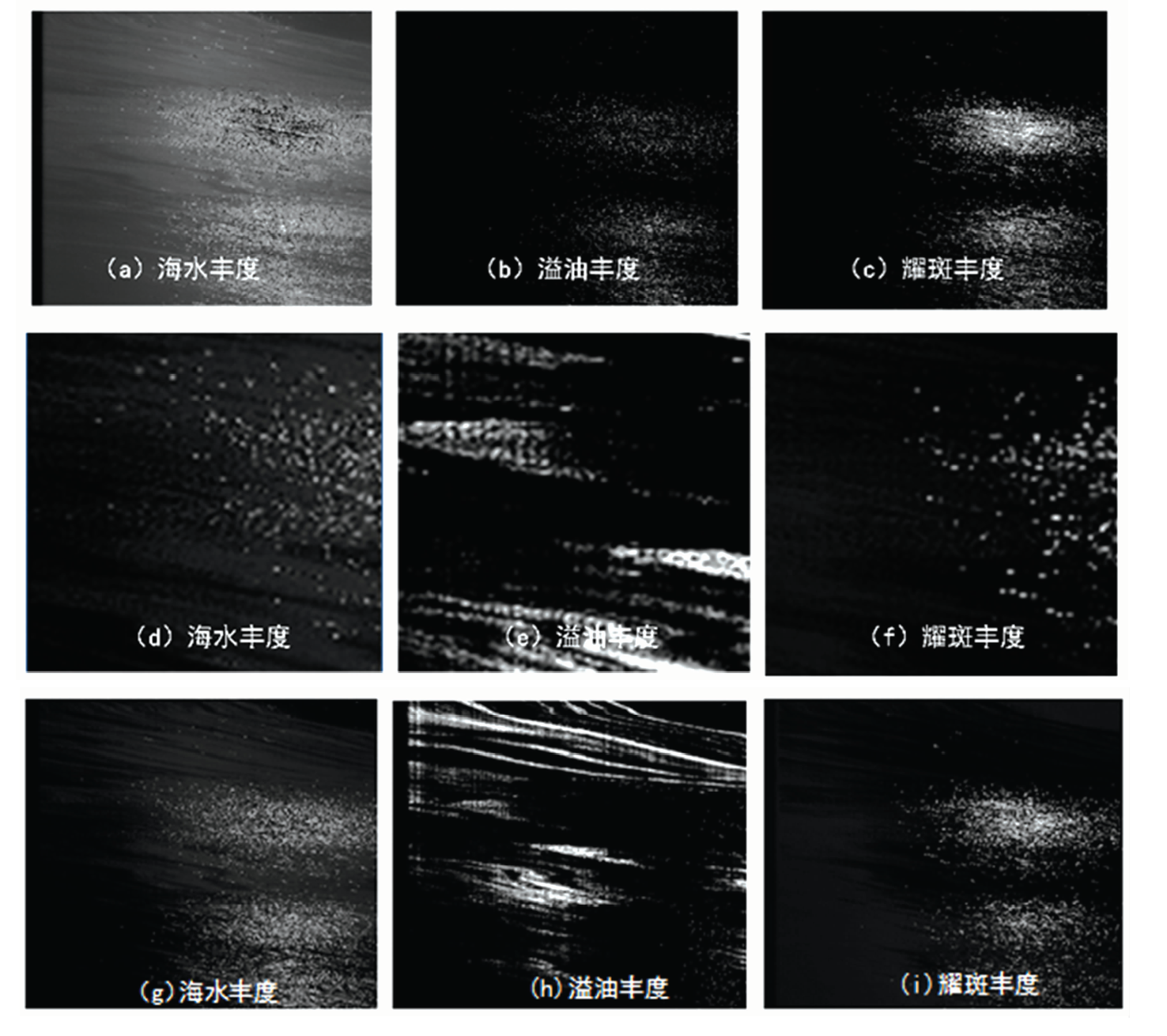 | 图8 三种方法端元解析丰度效果对比图Fig.8 The comparison diagram of endmember abundance between three methods (a— c): Analytical abundance acquired by ASD endmember; (d— f): Analytical abundance acquired by N-FINDR endmember; (g— i): Analytical abundance acquired out method |
比较发现, 本方法得到的溢油丰度效果明显好于传统方法, 且图像呈现条带状分布, 这与经验相符。 由于没有地面实测的定量丰度数据, 因此很难评定该丰度分解的精度, 根据仿真数据估计丰度估计误差在3%左右。
端元的提取顺序为, 溢油端元、 海水端元、 耀斑端元。 根据飞机飞行的地面分辨率可以计算出溢油的覆盖面积。 本次试验地面分辨率为2 m, 每个像素覆盖4 m2, 8景图像中每景图像像素点数取400× 400像素, 根据第1节给出通过丰度计算溢油覆盖度的计算方法, 表3计算出了溢油覆盖度和溢油面积。
| 表3 溢油覆盖度与面积的计算 Table 3 Calculation of oil spill coverage rate and area |
由表3可知, 本次测量的溢油覆盖面积为0.92 km2。 太阳耀斑的存在严重干扰溢油信息的提取[17], 使得上述溢油检测的面积存在误差。 太阳耀斑区往往也存在溢油, 溢油的实际的面积将会大于上述计算得到的面积, 需要进行耀斑区内溢油面积的估算。 由于太阳耀斑在大面积溢油场景中是随机分布的, 按照概率分布, 可根据溢油区和海水区的面积比对耀斑区的溢油面积进行估测, 1.08× (0.92/(0.92+3.12))=0.246, 所以真实溢油区的估测面积为0.92+0.25=1.17 km2, 溢油覆盖度为22.85%。
海监人员现场目测的溢油覆盖度为25%, 与本方法估测面积的偏差为2.15%, 这与仿真实验丰度估计误差小于3%的结论相符。 可见计算的结果较为可信, 估算的精度高于我们前期研究的结果[18]。
充分考虑通过地物光谱仪采集与航空采集高光谱的相似性与差异, 从理论上更符合人类的感知机制, 从技术实践上提高了对特定溢油光谱的识别的效率, 在海洋溢油的覆盖度探测中取得了较好的应用效果, 由于实际的溢油覆盖度水平很难进行实时的估测, 一般遥感器获得的数据均缺少实测的丰度信息, 所以采用仿真数据进行数据的精度评价是合理的。 另外太阳耀斑的存在严重干扰检测精度, 有必要在溢油丰度检测之前进行耀斑去除。 国际上对耀斑区地物探测尚没有成熟的方法, 本文从概率角度对耀斑区的溢油进行了合理的估测。 如果要进行更为精细的溢油探测, 则要分区进行, 各个区域覆盖程度不同, 可得到各个分区的溢油覆盖度水平, 并按照国家溢油检测规范[19]指导溢油的回收和去除。
基于像元丰度分解思想, 提出了一种通过分区混合端元计算海洋溢油覆盖度的探测方法。 该方法首先通过N-FINDR算法进行端元预选和独立分量分析(ICA)方法进行端元精选, 然后基于非负矩阵分解方法(NMF)求取端元丰度, 进而计算溢油覆盖度。 仿真数据与真实高光谱影像数据验证结果表明, 仿真丰度估计误差均低于3%, 真实溢油估计偏差为2.15%, 检测精度明显高于传统方法。 分区混合端元的提取较好的解决了全局端元变异及环境适应性差的问题, 使精选后的端元具有更好的环境鲁棒性。 受海面破损波影响, 和航空航天遥感器地面分辨率的限制, 海洋溢油遥感中单个像元进行丰度解析是一个难题。 实验结果表明, 该方法提取的端元更为客观, 一定程度上克服了全局端元提取缺点, 受光谱变异性影响较小, 提取的结果更符合人们的视觉经验, 是一种较为客观的自动化溢油覆盖度(丰度)探测的方法, 可较为准确的估测海洋溢油的覆盖度, 对未来航空航天器在轨业务化探测具有积极意义。
致谢: 感谢国家海洋局北海分局航空支队提供的航空高光谱成像溢油遥感数据。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|