



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
实用化拉曼光谱水下温度遥测系统研究
[任秀云 , 王玲, 田兆硕, 张延超
, 王玲, 田兆硕, 张延超* , 付石友]
, 王玲, 田兆硕, 张延超, 付石友]
|
|


作者简介: 任秀云, 女, 1978年生, 哈尔滨工业大学(威海)船海光电装备研究所副教授 e-mail: Renxiuyun_78@163.com
海水水下温度测量对研究海洋环境和气候监测及自然灾害的早期预报等十分重要。 利用蓝绿激光在海水中良好的透射性, 拉曼光谱技术可应用于大面积海水水下温度的快速遥感监测。 但目前能够实现现场连续水温监测功能的实用化拉曼光谱水温遥测系统还尚未见报道。 研制了实用化低成本的拉曼光谱水下温度遥测系统, 开发了光谱实时采集和数据处理软件。 数据处理中结合了面阵CCD的空间累加与时间积分及本底扣除算法, 有效增强了拉曼光谱的信噪比和光谱系统的探测灵敏度。 为了提高实际测温精度, 以短波段拉曼谱的面积( SHB)与长波段拉曼谱的面积( SNHB)之比作为光谱信标与水温建立关系, 研究了测温精度与光谱积分范围和拟合阶次的关系。 实验测量了五百多组不同水温的拉曼光谱, 分别选用比值 SHB/ SNHB和 SNHB/ SHB与水温进行线性拟合和二阶多项式拟合。 研究结果显示, 分界波长对面积比值变化范围影响很大, 而拟合阶次对面积比与温度的拟合关系的准确度影响很大, 两者最终都影响水温测量误差。 为了更客观地反应不同面积比法、 分界波长和拟合阶次对水温测量误差的影响, 分析了温度测量误差与不同分界波长的关系。 结果显示, 温度测量误差受分界波长影响较小, 受面积比法和拟合阶次影响较大; 相同情况下2阶多项式拟合结果优于相应的线性拟合结果; 而采用比值 SHB/ SNHB与水温进行线性拟合时测温精度较高, 且拟合参数易于调整。 进一步研究了不同面积比方法和分界波长对系统抗干扰性能的影响。 研究结果显示, 比值 SHB/ SNHB法抗干扰能力随分界波长减小而减小, 而比值 SNHB/ SHB法抗干扰能力随分界波长减小而增大。 上述研究结果提高了温度反演算法参数设置的合理性和拉曼散射系统测温精度及系统抗干扰能力。 综合考虑上述研究结果, 数据处理中设定649.3 nm作为分界波长计算拉曼光谱面积比 SHB/ SNHB与水温进行线性拟合。 最后通过实验检验了拉曼光谱水下温度遥测系统的连续实时测温能力和测温精度。 结果显示, 拉曼光谱系统测温值与高精度同步温度传感器测量温度一致, 最大测温误差为±0.5 ℃, 测温误差的标准差约0.21 ℃。
At present, underwater temperature measurement of seawater is a hot research topic, because knowledge about seawater temperature is of great importance in many fields. The laser Raman spectroscopy is a feasible method for measuring the vertical profiling of seawater temperature in large water areas. However, the real-time remote sensing of underwater temperature has not been reported. In this paper, a low-cost and practical Raman Lidar seawater temperature remote sensing system is constructed, and a real-time spectra acquisition and temperature determining software system is developed. Firstly, a background subtraction algorithm which combines the spatial accumulation of the array CCD with the exposure time integral is used to effectively enhance the signal to noise ratio of Raman spectra and improve the detection sensitivity of this Raman Lidar system. Usually the Raman spectra measured on-site are in low signal to noise ratio and baseline drift conditions. In this case, the “area ratio” (i. e. the ratio of the integrated Raman spectrum at low wavelength to the integrated Raman spectrum at higher wavelength) is a good temperature indicator. In this paper, we comprehensively studied the influence of Raman spectra area ratios split positions and fitting methods on the temperature measurement accuracy. More than 500 groups normalized Raman spectra at different temperatures are experimentally measured in the process of water temperature rising continuously. The area ratio SHB/ SNHB and SNHB/ SHB are used as the spectra characteristics to relate with the water temperature respectively, and both linear and second-order polynomial fitting algorithm are analyzed. The results show that the split positions have a great influence on area ratio variation range, and the fitting order has a great influence on the accuracy of fitting relationship between area ratio and seawater temperature. Both of them will eventually affect the water temperature measurement error. In order to objectively and directly reflect the influences of different area ratio methods, split position and fitting order on the water temperature measurement error, we further analyze the temperature measurement error at different conditions. The results show that the temperature measurement error is less affected by the split position, while is greatly influenced by the area ratio method and the fitting order. For the same split position and the same area ratio method, the results using order polynomial fitting are better than that using linear fitting. The results also show that linear fitting thearea ratios SHB/ SNHB with water temperatures is a good choice, because it can obtain good measurement accuracy, and at the same time it has the advantage that the fitting parameters are simple and easy to be adjusted. Furthermore, the influences of different area ratio method and split position on the anti-interference of the system are studied. The results show that the anti-interference of SHB/ SNHB method reduces with the decrease of the split wavelength, while the anti-interference of SNHB/ SHB method enhances with the decrease of the split wavelength. The research results are used to inform the parameter setting of water temperature determining method, and improve Raman Lidar system temperature measurement accuracy. Considering all these results above, we choose the large wavelength 649.3 nm as the split location to calculate the Raman spectra area ratios SHB/ SNHB, and linear fitting them with the water temperatures. Finally, the continuous temperature measuring performance of this Raman Lidar seawater temperature remote sensing system is verified experimentally. The experiment results show that the temperatures measured by Raman Lidar system are in good agreement with that by synchronous temperature sensor which is dipped in the sample tap-water and connected to the computer. The maximum measurement error is about ±0.5 ℃, and the standard deviation of measurement error is about 0.21 ℃.
海水水下温度测量是目前十分热门的研究课题[1, 2, 3, 4], 其测量数据可用于海洋环境研究、 气候监测及自然灾害的早期预报等众多领域。 接触式测温方法[5, 6, 7]和微波或红外遥感测温技术[8]都无法快速大面积地测量海水水下温度。 利用蓝绿激光在海水中良好的透射性, 激光拉曼光谱技术可应用于大面积海水水下温度的快速遥感监测[9, 10]。 早期基于光栅单色仪和光电倍增管的扫描式拉曼光谱遥感系统需要很长的扫描时间才能测量一幅较高分辨率的拉曼散射谱, 且测量的拉曼光谱信噪比低, 系统测量灵敏度低。 2015年Oh等用深制冷ICCD和高功率532 nm脉冲激光器研制了新的拉曼光谱遥感测量系统[11], 缩短了水拉曼光谱的测量时间。 Oh等采用该系统在实验室研究了超纯水的拉曼光谱信标与其温度的对应关系, 但其实验对待测水质和样品池的尺寸等的要求极为苛刻。 而实际海水测量环境复杂得多, 与实验环境相差甚远, 必然导致实际水温测量误差较大。 且该系统采用的深制冷ICCD造价高昂, 激光器的体积庞大, 不利于实际的海水温度测量。
本文研制了实用化低成本的拉曼光谱水下温度实时遥测系统, 应用LabVIEW开发了实时光谱采集和数据处理软件系统, 实现了水温的实时连续遥测。 首先, 数据处理中结合了面阵CCD的空间累加与时间积分及本底扣除算法, 有效提高了系统的探测灵敏度, 增强了拉曼光谱的信噪比; 然后研究了面积比分割位置和拟合方法对温度反演精度的影响, 提高了温度反演算法参数设置的合理性和拉曼散射系统测温精度。 实验结果表明, 该拉曼光谱水下温度遥测系统可以实时遥感测量水温, 测温精度较高。
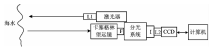
拉曼光谱水下温度实时遥测系统框图如图1。 发射系统由激光器和可调聚焦系统L1组成, 其中激光器是小型倍频连续Nd∶ YAG激光器, 输出功率1.7 W, 激光波长532 nm; 可调聚焦系统L1由150 mm焦距的正透镜和-100 mm焦距的负透镜组成, 通过调整透镜间距改变聚焦深度, 实现不同深度水温的测量。 接收系统包括望远镜、 滤光片F、 分光系统、 像增强器I和透镜L2以及面阵CCD, 计算机上安装实时采集与数据处理软件系统, 控制CCD的曝光时间和增益, 实时进行数据处理。 望远镜为卡塞格林结构, 口径为105 mm, 焦距为800 mm, 视场角3° ; 带通滤光片F的中心波长为650 nm, 带宽50 nm, 用于滤除后向的瑞利散射、 米散射和布里渊散射光。 系统采用1 800 line· mm-1光栅作为分光元件; 像增强器I的分辨率为64 lp· mm-1; 成像透镜L2的焦距为16 mm, CCD采用2/3英寸的华谷动力面阵CCD, 其分辨率为1 360× 1 024, 像素尺寸6.45 μ m× 6.45 μ m。
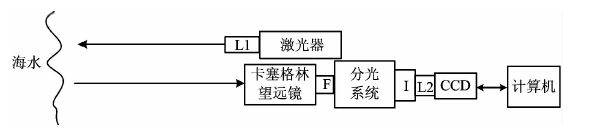 | 图1 拉曼光谱水下温度遥测系统结构框图Fig.1 Structure of the Raman Lidar seawater temperature remote sensing system |
采用LabVIEW开发了实时拉曼光谱采集和数据处理软件系统, 如图2所示。 该软件系统实时显示拉曼光谱采集和数据处理的中间过程; 实时显示拉曼散射测温结果和温度传感器同步测量结果并画出连续水温曲线; 可随时调整水温反演算法的参数设置, 以excell数据形式实时存储测量的拉曼光谱。
 | 图2 实时光谱采集和数据处理软件系统Fig.2 Real time acquisition and data processing system |
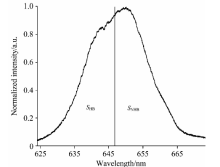
由于海水拉曼光谱十分微弱, 实时遥测需要极高的探测灵敏度, 而CCD的探测灵敏度远低于光电倍增管等单点探测器。 现有光谱测量仪器一般通过增加曝光时间来增强信号强度, 无法快速测量微弱拉曼光谱。 本文将面阵CCD的空间累加与时间积分和本底扣除算法相结合, 增强了系统的探测灵敏度和光谱信噪比, 实现了拉曼光谱的实时遥测和海水温度的实时反演。 图3是该系统在室内灯光条件下测量的水的归一化拉曼光谱。 进行未知水温测量前需要首先校准拉曼光谱信标与水温的关系曲线。 研究发现, 实验室测量的近场拉曼光谱信噪比高, 基线漂移情况稳定, 用函数拟合法或双色法进行处理时都有较好的测温精度; 而现场测量的拉曼光谱信噪比低且光谱强度和基线都有很大的波动, 降低了实际测温精度。 比较来说, 以短波段拉曼谱的面积(SHB)与长波段拉曼谱的面积(SNHB)之比作为光谱信标的方法抗干扰能力强。 但是对于长短波的范围以及拟合方法等问题不同文献之间存在分歧[11, 12], 尚需要通过相应的理论与实验研究分析如何选择更为合理。
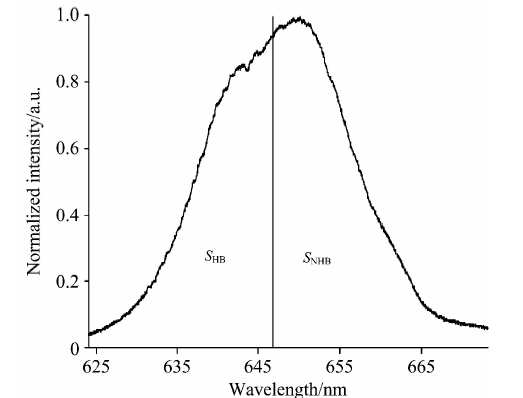 | 图3 实验测量的归一化拉曼光谱Fig.3 The measured Raman spectrum |
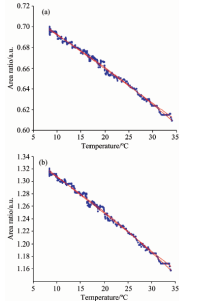
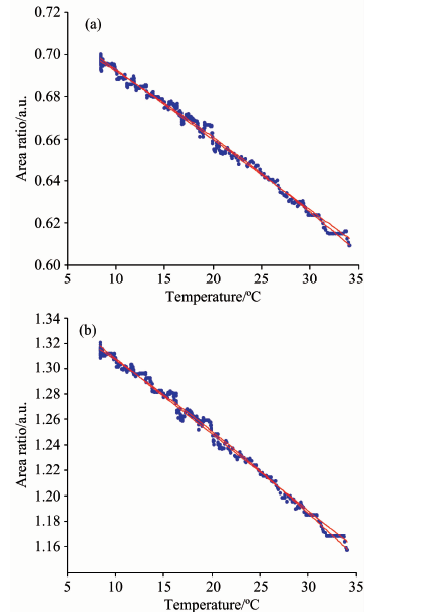
在水温连续上升过程中实验测量得到五百多组归一化的拉曼光谱, 首先用拉曼谱面积比SNHB/SHB与水温进行拟合, 研究水温测量精度与光谱积分区间和拟合方法的关系。 图4(a)— (b)分别给出了其中两种积分区间划分时线性拟合和2阶多项式拟合的结果, 其中图4(a)是分界波长选为645.7 nm时的情况, 图4(b)是分界波长选为649.3 nm时的情况。 研究结果显示, 水温逐渐上升的过程中比值SNHB/SHB对应增大, 2阶多项式拟合的相关性比线性拟合更高; 分界波长645.7 nm时比值SNHB/SHB变化范围较大而分界波长649.3 nm时比值SNHB/SHB变化范围较小。 在分界波长逐渐由短波移动到长波的过程中, 比值SNHB/SHB变化范围明显变小, 但其与温度的线性相关度没有明显提高。
 | 图4 面积比SNHB/SHB与水温的拟合曲线 (a): 分界波长645.7 nm; (b): 分界波长649.3 nmFig.4 Calibration curves of SNHB/SHBrelate to temperature (a): Divided by 645.7 nm; (b): Divided by 649.3 nm |
图5给出了对应积分区间划分时比值SHB/SNHB与温度的拟合关系, 用于对比分析究竟是采用SNHB/SHB面积比法还是SHB/SNHB面积比法更合理。 图5(a)是分界波长645.7 nm时的情况, 而图5(b)是分界波长649.3 nm时的情况。 由图5可见, 比值SHB/SNHB随水温升高而逐渐减小, 同样分界波长2阶多项式拟合的相关性比线性拟合更高; 分界波长645.7 nm时比值SHB/SNHB变化范围较小而分界波长在649.3 nm时比值SHB/SNHB变化范围较大。 综合分析图4和图5可以看出, 分界波长对面积比值变化范围影响很大, 而拟合阶次对面积比与温度的拟合关系的准确度影响很大, 两者都会影响水温测量误差(依据拟合结果计算的温度值与实际温度之差)。
 | 图5 面积比SHB/SNHB与水温的拟合曲线 (a): 分界波长645.7 nm; (b): 分界波长649.3 nmFig.5 Calibration curves of SHB/SNHB relate to temperature (a): Divided by 645.7 nm; (b): Divided by 649.3 nm |
图6给出了温度测量误差与不同分界波长的关系, 可以更客观直接地反应出不同面积比法、 分界波长和拟合阶次对水温测量误差的影响。 图6中加号是线性拟合比值SNHB/SHB与水温时对应的温度测量误差; 点符表示线性拟合比值SHB/SNHB与水温时对应的温度测量误差; 叉号是采用2阶多项式拟合法拟合比值SNHB/SHB与水温时对应的温度测量误差; 星符表示采用2阶多项式拟合法拟合比值SHB/SNHB与水温时对应的温度测量误差。 图6中仿真结果显示, 温度测量误差受分界波长影响较小, 而受面积比法和拟合阶次影响较大; 总体来说2阶多项式拟合结果优于相应的线性拟合结果, 对应的温度测量误差较小, 与图4和图5的结果相符。 具体来说, 若选用SNHB/SHB比值法, 2阶多项式拟合方式对应的温度测量误差明显小于线性拟合情况, 但其拟合曲线比较复杂, 实际应用中发现拟合曲线参数易随待测水的温度变化范围、 水质状况和其他系统参数设置影响而出现误差。 而选用比值SHB/SNHB与水温进行拟合时, 温度测量精度受拟合阶次影响较小, 且测温精度较高。 综合考虑以上结果认为, 采用比值SHB/SNHB与水温进行线性拟合时测温精度较高, 参数设置易于调整。
 | 图6 测温误差随分界波长的变化Fig.6 Split wavelength vs. temperature error |
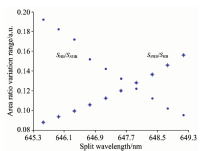
研究中还发现, 不同面积比方法和分界波长还严重影响比值的变化范围, 间接影响系统抗干扰性能。 图7所示是分界波长与面积比变化范围的关系, 其中点符是比值SNHB/SHB变化范围与分界波长的关系(温度由11.4 ℃逐渐升高到42.9 ℃), 星符是相同情况下分界波长与比值SHB/SNHB变化范围的关系; 由图7可以看出, 比值SHB/SNHB变化范围随分界波长减小而减小, 而比值SNHB/SHB变化范围随分界波长减小而增大。 综合考虑图7和图8的研究结果认为: 采用线性拟合水温与比值SHB/SNHB法时, 为了在实际测量中获得较强的抗干扰能力分界波长应该选在较大波长处。
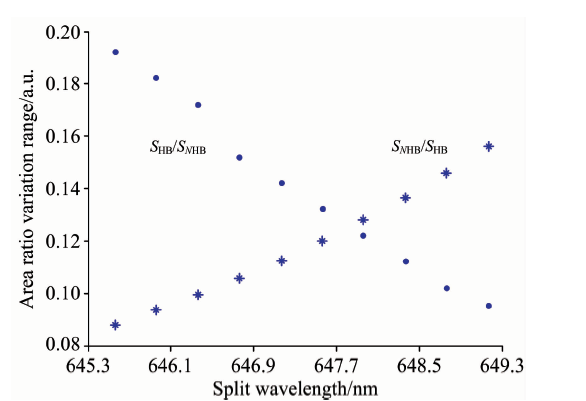 | 图7 面积比变化范围随分界波长的变化Fig.7 Split wavelength vs. area ratio variation range |
 | 图8 实验测量水温结果(a)与测温误差(b)Fig.8 Experimental measurement results of water temperature (a) and temperature deviations (b) |
根据上述研究结果, 以649.3 nm作为分界波长计算拉曼光谱面积比SHB/SNHB, 与水温进行线性拟合完成温度与光谱信标的建模后, 在实验室实时遥测了自来水的温度, 以及测试系统的温度测量精度和稳定性。 测量时面阵CCD的曝光时间约为0.7 s, 增益设置为最大值, 光谱时间平均5次, 水池尺寸为57 cm× 9 cm× 15 cm, 与拉曼散射激光遥感测温系统相距约10 m。 图8(a)和(b)给出了连续100次实验测量水温和误差结果。 图8(a)的实验结果表明, 拉曼光谱系统的测温结果与实际水温(数字温度传感器的测温结果)符合得较好, 测量水温在实际水温的上下波动。 由图8(b)可见, 拉曼光谱系统的最大测温误差约为± 0.5 ℃, 测温误差的标准差为0.21 ℃, 表明该系统可以实时遥感测量水体温度, 测温精度较高。
研制了实用化低成本的拉曼光谱水下温度遥测系统, 采用LabVIEW开发了实时光谱采集和水温反演软件系统, 实现了水温连续实时遥测功能。 数据处理中结合了面阵CCD的空间叠加和时间积分以及背景扣除算法提高了拉曼光谱的信噪比和系统的探测灵敏度, 然后研究了面积比分割位置和拟合方法对温度反演精度的影响。 研究结果提高了温度反演算法参数设置的合理性和拉曼散射系统测温精度。 最后通过实验验证了该拉曼光谱水下温度遥测系统的测温性能。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|