{kind=link}
{kind=link}
{kind=link}
基于不确定油液光谱数据的综合传动装置剩余寿命预测
[闫书法1  , 马彪
, 马彪1 , 郑长松1, * , 朱礼安2 , 陈建文2 , 李慧珠1 ]
, 马彪, 朱礼安|
|


作者简介: 闫书法, 1990年生, 北京理工大学机械与车辆学院博士研究生 E-mail: yanshufa1990@163.com
原子发射光谱分析得到的磨损微粒元素浓度是综合传动装置性能劣化评估和剩余寿命预测的重要监测指标。 由于系统随机劣化过程和光谱测量误差的影响, 油液光谱数据中不可避免包含系统劣化随机性和光谱测量不确定性。 然而, 现有基于油液光谱数据的剩余寿命预测研究中, 没有考虑劣化过程的随机性和测量的不确定性对剩余寿命预测的影响。 因此, 针对综合传动装置劣化随机性和油液光谱数据测量不确定性对寿命预测的影响, 提出一种考虑系统随机劣化和数据不确定测量的综合传动装置劣化过程建模方法。 基于随机过程首中时间的概念, 定义了综合传动装置的剩余寿命; 基于Wiener随机过程, 建立了考虑系统随机劣化和不确定测量数据的综合传动装置劣化模型, 利用极大似然估计方法, 估计了劣化过程模型的参数; 利用卡尔曼滤波技术, 实现了综合传动装置劣化状态的实时估计与更新, 进一步得到了考虑系统劣化随机性和光谱数据测量不确定性的剩余寿命分布。 研究结果表明, 提出的劣化建模方法能够准确估计装置的运行状态, 避免了采用条件维护时间对装置进行维护与保养的局限性; 综合传动装置的维护时间预测值比条件维护时间延长了193 Mh(113.5%); 考虑光谱数据测量不确定性的剩余寿命预测方法优于不考虑测量不确定性的方法。
The oil spectral data are introduced to indicate the performance degradation and the remaining useful life(
近年来, 现代化工业设备正朝着大规模、 复杂化的方向发展, 工业设备的可靠性、 安全性与实用性受到广泛的重视[1]。 车辆综合传动装置等复杂时变的机电系统, 在长周期运行过程中受到各种环境因素的影响, 其材料的性能会逐渐发生劣化, 进而表现为设备输出参数的变化, 如机械元件的磨损、 密封元件的泄露等[2]。 当系统劣化累积到一定程度时, 系统便不能再提供所需功能, 即被认为失效[3]。 因此, 通过设备劣化的测量数据, 建立其劣化规律的演化模型, 进而实现设备剩余寿命(remaining useful life, RUL)估计是一条切实可行的方法[4]。
综合传动装置中的磨损零部件众多, 且性能劣化机理复杂, 金属磨粒来自于不同的摩擦副表面且在油液中均匀混合。 MOA Ⅱ 原子发射光谱仪可分析油液中微小磨粒的元素浓度[5], 这使得油液光谱数据成为综合传动性能劣化的重要监测指标。
目前针对综合传动装置的状态监测与故障诊断问题, 已有学者利用油液光谱数据开展了许多研究工作[6, 7]。 Wan等[8]利用数理统计的方法, 制定了油液分析的浓度界限值与趋势界限值, 为油液润滑系统的状态监测及换油周期的制定提供了依据。 Li等根据磨合试验油液光谱数据, 给出了系统磨损量与油液磨粒初始浓度、 磨合转速的函数关系, 建立了综合传动装置磨损量计算模型。 Zhang等利用油液光谱分析数据, 采用多输出最小二乘支持向量回归方法对综合传动装置进行了寿命预测研究。 最近, Liu等基于正漂移Wiener过程, 建立了综合传动装置的劣化失效预测模型, 得到了元素光谱含量增长趋势的预测结果以及首中时间。 但是, 以上这些代表性研究成果中, 都没有考虑油液光谱数据测量过程中可能存在油液混合不均匀等测量不确定性的情况, 且不能实现剩余寿命的实时估计。 然而, 由于综合传动装置劣化随机性和光谱数据测量不确定性的影响, 必然会对系统劣化状态的估计造成影响, 造成剩余寿命预测的不准确。
针对以上问题, 基于随机劣化过程的首中时间定义了综合传动装置剩余寿命的概念, 利用Wiener随机过程提出了一种考虑油液光谱数据不确定性和系统劣化随机性的综合传动装置劣化建模方法。 利用极大似然方法完成了劣化模型的参数估计, 并利用卡尔曼滤波技术, 实现了综合传动装置潜在劣化状态的实时估计, 得到了考虑系统劣化随机性和光谱数据测量不确定性的剩余寿命分布。 最后通过实验, 证明了方法的有效性。
综合传动装置中的金属磨粒主要由磨损产生, 由于磨损程度变化的不确定性, 金属磨粒的生成可以被近似为扩散过程[4], 即是由布朗运动驱动的连续时间连续状态的随机过程。 近年来, 在描述系统随机劣化过程中, Wiener过程模型得到了广泛应用。 因此, 采用油液光谱数据, 利用Wiener过程模型对综合传动装置劣化过程进行建模。
一般来说, 基于Wiener过程的系统劣化模型可以描述为
式中, 劣化过程{X(t), t≥ 0}是由标准布朗运动{B(t), t≥ 0}驱动的, σ 是扩散系数, θ 是漂移系数, 且有σ B(t)~N(0, σ 2t), 以用来表示劣化过程的随机性及随时间变化的不确定性。
在对综合传动装置的状态监测过程中, 虽然按照严格的采样标准对润滑油液进行实时采样, 按照标准的分析方法实时分析。 然而, 由于油液取样和分析摇匀等过程中油液混合不是绝对均匀的, 且装置存在漏油、 补油等影响磨粒浓度的行为, 因此, 不可能做到油液取样、 保存与分析过程的绝对理想, 所得的油液光谱数据也不可避免的存在测量不确定性。 因此, 测量得到的油液光谱数据是非理想的, 只能部分反映综合传动装置的潜在劣化状态。 为了描述光谱数据测量的不确定性, 令{Y(t), t≥ 0}表示对应的测量过程, 采用在劣化建模和寿命估计领域最常用的测量模型[4], 建立综合传动装置的潜在劣化状态与不确定油液光谱数据之间的关系。 潜在劣化状态与测量之间的关系为
式中, ε 为测量误差, 是一个随机变量, 且满足正态性, 即ε ~N(0, γ 2), 并假设在任意时刻测量误差与标准布朗运动B(t)相互独立。
通过随机劣化过程首中时间(first hitting time, FHT)的概念来定义综合传动装置的寿命, 即如果随机劣化过程{X(t), t≥ 0}首次达到预先给定的维护阈值, 则认为综合传动装置失效, 需要进行维护。 根据首中时间的概念, 给定维护阈值为ω , 则综合传动装置的寿命定义为
为了能够根据实时测量的油液光谱数据预测综合传动装置的剩余寿命, 并在获得新的油液光谱数据之后对剩余寿命进行更新。 假设油液采集时间点为0=t0< t1< …< tk, 令yk=Y(tk)表示tk时刻的光谱测量数据。 因此, 在tk时刻之前所有的光谱测量数据集合可以表示为Y1: k={y1, y2, …, yk}, 对应的劣化状态的集合为X1: k={x1, x2, …, xk}, 其中xk=X(tk)。 由式(2)进一步将光谱测量数据描述为yk=xk+ε k, 其中ε k是ε 的独立同分布实现。
根据首中时间的概念, tk时刻综合传动装置的剩余寿命Lk可以定义为
对应的剩余寿命Lk的概率密度函数和累积分布函数分别为flk
为了将综合传动装置当前劣化状态与剩余寿命估计的更新过程融入潜在的劣化过程{X(t), t≥ 0}中, 在综合传动装置正常运行的时刻tk, 假设潜在劣化状态X(t)=xk(xk< ω )。 对于t≥ tk, 根据Wiener过程的马尔可夫性, 在时刻综合传动装置的劣化轨迹为
根据劣化轨迹, 如果时刻t是随机劣化过程{X(t), t≥ 0}的首中时间, 则根据剩余寿命的定义(4), 综合传动装置对应tk时刻的剩余寿命的值就可用t-tk表示。
令lk=t-tk,
为了得到综合传动装置剩余寿命Lk的概率密度函数flk
上述估计得到的综合传动装置tk时刻条件剩余寿命是依据潜在劣化过程{X(t), t≥ 0}得到的, 且仅与当前劣化状态xk有关。 根据上述, 在综合传动装置运行过程中, 仅有光谱数据的不确定测量yk可以得到, 而劣化状态xk是无法精确测量的, 因此无法直接估计剩余寿命。
为实现基于不确定测量光谱数据的剩余寿命估计, 需要刻画测量不确定性对劣化状态估计的影响, 即基于不确定测量光谱数据Y1: k对综合传动装置的劣化状态xk及其概率分布进行估计。 将光谱数据测量方程与劣化状态方程离散化, 得到综合传动装置的劣化模型
式中, vk=σ (B(tk)-B(tk-1)), ε k是ε 在tk时刻的实现, vk~N(0, σ 2(tk-tk-1)), ε k~N(0, γ 2), 且序列{vk, k≥ 1}与{ε k, k≥ 1}独立同分布。
下面根据建立的综合传动装置的劣化模型(11), 利用卡尔曼滤波技术估计潜在劣化状态[11]。 定义
根据上述对综合传动装置劣化状态估计与更新过程, 所得到的所有光谱测量数据Y1: k的状态xk的后验估计是高斯分布的, 即xk|Y1: k~N(
引理 在给定当前劣化状态xk和所有测量Y1: k, 剩余寿命的概率密度函数和累积分布函数有如下性质
下面利用下式推导得出考虑光谱数据不确定性的综合传动装置的剩余寿命估计
根据式(
可以发现, 综合传动装置的估计剩余寿命既考虑了潜在劣化过程的随机性, 又光谱测量过程中的不确定性, 在γ 2=0时, 以上的剩余寿命估计即为仅考虑劣化过程本身随机性的剩余寿命。
综合传动装置是装甲车辆行驶驱动系统的核心部件之一。 在运行过程中, 由于综合传动装置长期工作在高速重载的恶劣工况下, 必然会造成内部齿轮、 离合器等关键零部件磨损, 引起润滑油液中的磨损颗粒增加, 进一步恶化综合传动装置的工作环境, 随着工作时间的累积, 最终导致系统失效[12]。 因此, 通过对综合传动装置油液光谱数据的监测, 建立起劣化规律的衍化模型, 进而评估设备的寿命, 对保障装甲车辆的可靠性具有重要的意义。
光谱油液样本来自于三台综合传动装置运行中的实时采样, 光谱数据包括在运行过程中400个不同状态监测点上的润滑油液样本的光谱测量数据。 每一个油液样本均按照严格的采样方法得到。 在样品的采集、 保存与运输过程中使用了清洁的采样阀与采样瓶。 所有参与油样采集、 光谱分析的操作人员都经过严格的采样与分析训练, 尽量保证油液光谱数据的准确性。
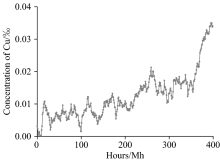
最终得到的油液光谱数据共包括21种常见金属元素。 文献[13]认为Fe, Cu和Mo元素为指示综合传动装置性能劣化判别的指示元素, 它们能够准确的反映摩擦元件磨损程度与综合传动装置劣化程度。 本文以Cu元素为例, 对综合传动装置进行潜在劣化状态估计和剩余寿命预测研究。 其中一台综合传动装置运行中Cu元素浓度的变化曲线如图1所示。
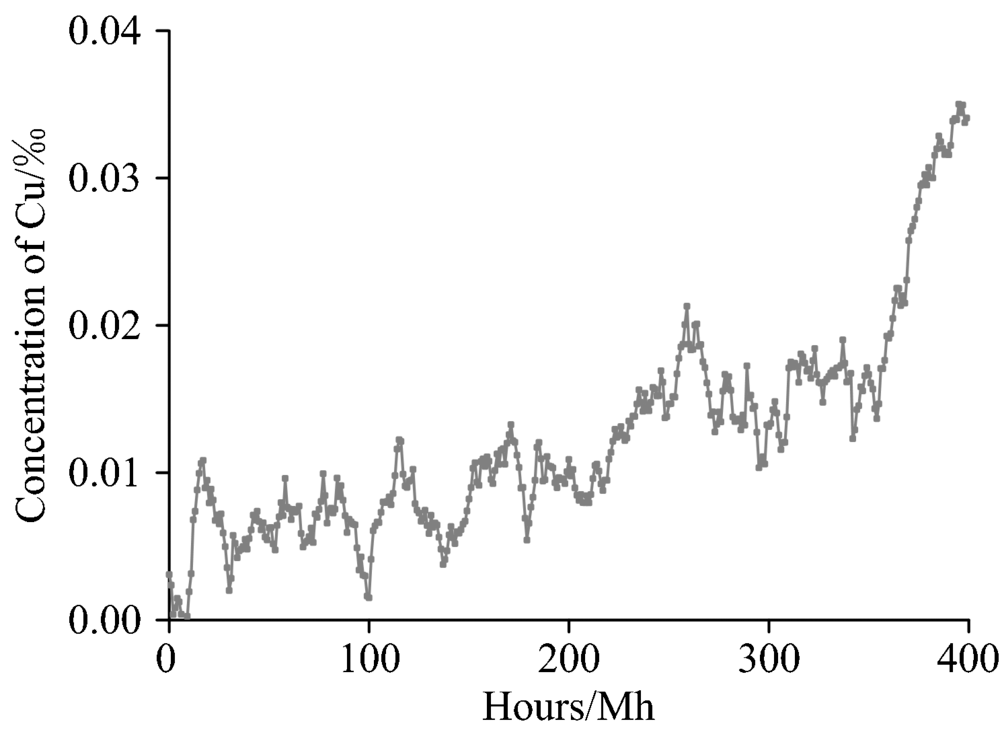 | 图1 指示元素浓度变化曲线Fig.1 Concentration of indicating elements |
由图1可以发现, 由于油液光谱数据的测量不确定性的影响, 可能会出现光谱测量数据在综合传动装置达到维护时间之前超过维护阈值的情况。 因此, 不能仅通过光谱测量数据确定综合传动装置的剩余寿命, 而应通过潜在劣化过程进行剩余寿命估计。
为实现综合传动装置的剩余寿命预测, 需要利用历史油液光谱数据确定劣化模型的参数σ 2, γ 2, θ 。 采用其余两台综合传动装置油液光谱测量数据, 利用极大似然方法[17]估计劣化模型参数。 假设第i台综合传动装置在时间tj采集的油液对应的光谱测量数据为yi, j, 则所有的光谱测量数据为{Yi(tj)=yi, j, i=1, 2, j=1, …, 400}。
研究第台综合传动装置测得的光谱测量数据对应的似然函数。 令测量时间t=(t1, …, t400)', 光谱测量数据yi=(yi, 1, …, yi, 400)', 根据布朗运动的性质与独立性假设, 易知光谱测量数据yi为多变量正态分布的, 其均值与方差为
因此, 对于第i个综合传动装置的光谱测量数据, 有
令Θ (σ 2, γ 2, θ )'为参数向量, Yi为第i台综合传动装置的所有光谱测量数据, 根据不同综合传动装置光谱测量数据之间的独立性假设, 关于参数向量Θ 对应所有光谱测量数据Yi的似然函数为
利用综合传动装置运行中测量得到的光谱数据, 通过最大化式(22)就可以得到σ 2, γ 2, θ 的极大似然估计值。 考虑光谱数据测量不确定性和不考虑测量不确定性的参数估计结果如表1所示。
| 表1 劣化模型参数估计结果 Table 1 Estimation result of deterioration model parameters |
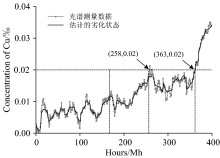
先前的研究中, 综合传动装置Cu元素光谱数据条件维护浓度阈值设定为0.02‰ (20 ppm), 条件维护时间设定为170 Mh[14]。 根据估计得到的表1中劣化模型参数, 利用图1中的综合传动装置全寿命周期光谱数据, 就可以实现综合传动装置的剩余寿命预测。 基于油液光谱测量数据估计得到的综合传动装置潜在劣化状态如图2所示。 其中170 Mh处的垂直虚线代表规定的维护时间, 基于指示元素Cu光谱测量数据的首中时间和基于潜在劣化状态估计的首中时间也分别用坐标表示。
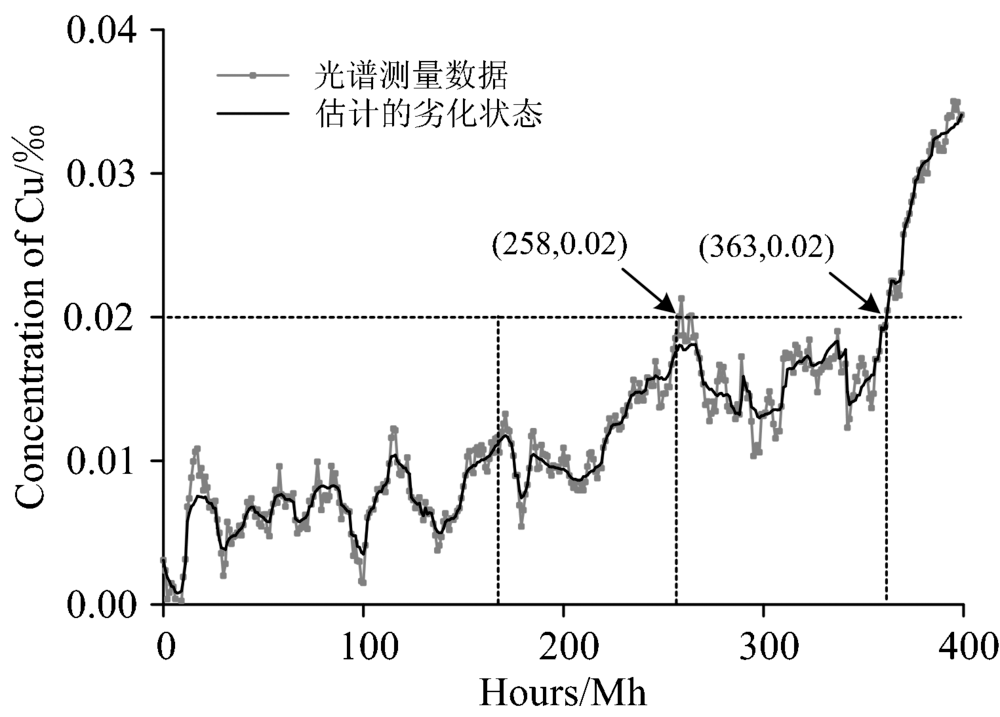 | 图2 潜在劣化状态估计Fig.2 Estimation of potential deterioration state |
由图2可以看出, 在综合传动装置运行至条件维护时间170 Mh时, 指示元素Cu的光谱测量数据为0.012‰ , 远小于指示元素Cu的浓度维护阈值; 分析可知, 由于浓度维护阈值是依据同类型综合传动装置油液光谱数据通过3σ 原则[8]制定的, 进而得到相应的条件维护时间, 没有考虑装置的运行工况、 驾驶员操作习惯等因素的差异性, 导致装置在到达条件维护时间时, 指示元素浓度小于浓度维护阈值, 仍处在健康工作状态。 因此, 依据条件维护时间对该综合传动装置进行预防性维护必然会造成维护资源的浪费。
在综合传动装置运行至第197 Mh时, 指示元素Cu的光谱测量数据超过了设定的条件维护浓度阈值0.02‰ , 随着装置的继续运行, 光谱测量数据迅速降低至条件维护浓度阈值0.02‰ 以下, 直至装置运行至第363 Mh时, 光谱测量数据再次超过0.02‰ ; 分析可知, 由于润滑油液混合不均匀、 油液样本的测量误差等不确定原因, 造成了指示元素的测量数据暂时超过条件维护浓度阈值。 因此, 装置在197~363 Mh时间段内仍处在健康磨损状态, 不需要进行维护与保养工作。 在运行至370 Mh后, 指示元素Cu光谱测量数据持续上升, 此时需要对综合传动装置进行维护与保养。
提出的基于不确定测量光谱数据的综合传动装置剩余寿命预测方法能够合理的判断装置的磨损健康状态, 估计得到的综合传动装置维护时间为363 Mh, 比规定的条件维护时间延长了197 Mh, 比基于光谱测量数据首中时间的维护时间延长了105 Mh, 避免了装置在健康运行状态工况下的不必要的维护与保养。
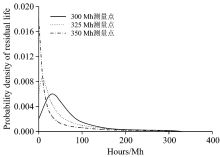
在综合传动装置潜在劣化状态估计的基础上, 通过式(16)计算在不同光谱测量数据点时的剩余寿命概率密度。 给出了几个不同光谱测量数据点对应的估计剩余寿命的概率密度函数曲线, 如图3所示。
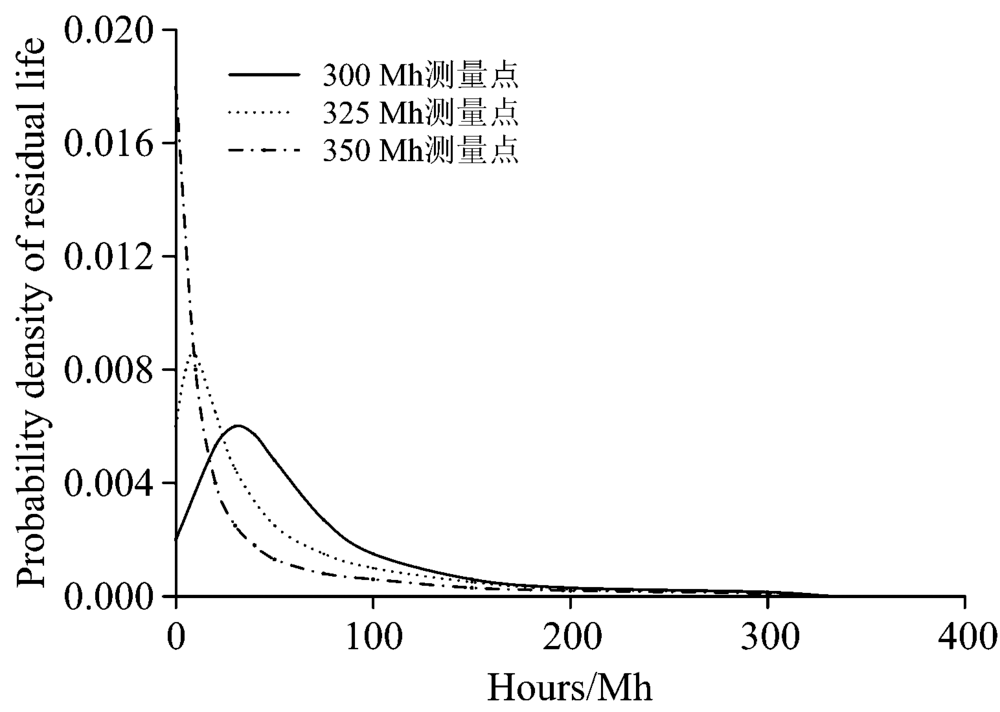 | 图3 剩余寿命概率密度曲线Fig.3 Probability density curve of residual life |
综合传动装置的劣化建模与剩余寿命预测是为装置的事情维护策略服务的。 而由图3可知, 本剩余寿命预测方法不仅能够实现综合传动装置的剩余寿命, 还能得到剩余寿命的概率密度分布情况, 表征了剩余寿命预测结果的不确定性, 这为综合传动装置视情维护策略的制定提供了重要的参考[15]。
为验证基于光谱不确定测量数据的剩余寿命预测方法对剩余寿命估计的准确性, 分别在综合传动装置寿命20%, 50%和80%分位点上, 计算比较考虑光谱数据不确定性和不考虑光谱数据不确定性时剩余寿命估计得到的剩余寿命和对应真实剩余寿命的相对误差, 如表2所示。
| 表2 估计的平均剩余寿命和相对误差 Table 2 Mean residual life and relative error |
由表2可以看出, 考虑光谱数据测量不确定性的方法具有较小的相对误差, 能够提高剩余寿命预测的准确性。
为减少油液光谱数据测量过程中可能存在的油液混合不均匀等测量误差对剩余寿命预测准确性的影响, 实现对综合传动装置剩余寿命的准确预测。 基于Wiener随机过程提出了一种考虑油液光谱数据不确定性和系统劣化随机性的综合传动装置劣化状态建模方法, 并定义了基于随机过程首中时间的综合传动装置剩余寿命的概念。 利用极大似然方法实现了劣化模型的参数估计, 并利用卡尔曼滤波技术实现了剩余寿命的实时预测与更新, 最终得到了考虑系统劣化随机性和光谱数据测量不确定性的剩余寿命概率分布。 实验结果表明, 提出的劣化建模与寿命预测方法能够准确估计装置的运行状态, 避免了采用条件维护时间对装置进行维护与保养的局限性, 且优于不考虑测量不确定性的方法, 能够提高剩余寿命预测的准确性。 研究结果表明, 基于光谱不确定测量数据的综合传动装置预测维护时间为363 Mh, 较规定的条件维护时间延长了193 Mh(113.5%), 较基于光谱测量数据首中时间的维护时间延长了105 Mh。 综合传动装置维护时间的延长, 能够有效的减少全寿命周期内的维护次数, 并最终降低维护成本。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|