



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
国外差分吸收激光雷达探测大气水汽廓线的研究进展
[洪光烈1  , 李嘉唐
, 李嘉唐2 , 孔伟1, * , 舒嵘1 ]
, 李嘉唐, 舒嵘|
|


作者简介: 洪光烈, 1966年生, 中国科学院上海技术物理研究所研究员 E-mail: glhong@mail.sitp.ac.cn
水汽含量是大气最基本的物理参量之一, 大气水汽垂直分布结构对于大气过程的研究十分有意义。 差分吸收激光雷达可以昼夜获取高精度、 高距离分辨率的大气水汽垂直分布廓线, 是最有潜力的探测手段。 国际上已经发展出几种类型的差分吸收激光雷达, 对它们的发展路径做一梳理, 理清发展脉络, 具有有益的参考价值。 其中, 稍早时期水汽差分吸收激光雷达工作在4 ν振动吸收带720~730 nm频域, 以Alexandrite为主流的激光器或者Nd:YAG/ruby固体激光器泵浦的染料激光器作为发射光源, 光电倍增管仍然可以在这个波段担任探测器, 代表性的仪器是法国的机载LEANDRE Ⅱ。 此后发展的820 nm波段的水汽差分吸收激光雷达, 以钛宝石激光器或钛宝石光放大器为发射机, 以硅的雪崩二极管作为探测器, 紧跟前置放大和数据的AD采集器, 如德国Hohenheim大学的车载扫描激光雷达, 可以获得对流层300~4 000 m之间水汽两维或三维分布结构; 德国Institutfür Meteorologie und Klimaforschung所建立的差分吸收激光雷达可以探测3~12 km高度之间大气的水汽垂直分布。 720和820 nm波段水汽吸收截面较小, 更适合于地基或车载的对流层水汽廓线探测。 而水汽3 ν振动谱935 nm区域吸收截面较大, 是为了空间探测大气对流层上、 平流层下相对干燥区域的水汽分布而准备的, 且可以安排多个探测波长, 和一个参考波长, 它们对水汽的吸收截面大小呈梯度分布, 以应对空间对地观测时不同高度大气水汽浓度的差别。 基于种子注入的光参量振荡器或Nd:YGG全固态激光器的935 nm差分吸收激光雷达, 以德国Deutsches Zentrumfür Luft- und Raumfahrt的研究最为成功, 推动了欧洲空间局立项发展空间水汽差分吸收激光雷达WALES(Water Vapour Lidar Experiment in Space), 测量从地球表面到平流层下、 高垂直分辨率和高精度水汽浓度分布。 机载多波长水汽差分吸收激光雷达1999年建立起来, 担当空间WALES任务的模拟器, 2006年完成了机载飞行试验。 以823~830 nm分布布拉格反射半导体激光器和半导体光放大器为核心、 采用雪崩二极管盖格光子计数技术的微脉冲差分吸收激光雷达, 是差分吸收激光雷达面向商业化、 可普及的方向迈出的重要一步, 目前已经发展到第四代产品。 发射机激光工作波长的长期稳定十分重要而棘手, 以窄带连续波种子激光注入脉冲激光器的谐振腔锁定其的腔长, 种子激光的波长以水汽的多通道光吸收池为参照标准, 或以高精度波长计为误差获取手段, 通过负反馈进行主动稳频; 其次, 需要仔细考虑大气对激光的后向散射光谱线型, 显然Rayleigh后向散射光的多普勒展宽与水汽吸收光谱线宽度可以比拟, 所以其吸收截面 σon和 σoff必需加以修正; 水汽的空间垂直分布梯度大, 因此差分吸收激光雷达应该实行分通道探测。
Water vapor is one of the basic atmospheric parameters, and the vertical structure of the atmosphere is of great importance to process studies. Differential absorption lidar is the techniques which provide high resolution and accuracy for water vapor profiles daytime and nighttime, and that is the most potential instrument. Differential absorption lidar (DIAL) operates in the 720~730 nm region of the 4 ν overtone vibrational bands of H2O where previous using tunable dye, or Alexandrite ring laser injection seeded, however, photomultiplier acts as detector. The represent is airborne lidar LEANDRE II. And the DIAL transmitter is based on an injection-seeded, Ti:Sapphire laser or Ti:Sapphire amplifier operated at 820 nm, Si-APD act as detector. University Hohenheim mobile lidar can perform the measurements of the 3-dimensional structure of the water vapor field from 300 m to 4 km altitude. The high-power DIAL at the Schneefernerhaus research station has successfully demonstrated its measurement capabilities of vertical structure of water vapor from 3 to 12 km above sea level. The development of an OPO at 935 nm in the spectral region of the 3 ν overtone vibrational band of H2O was stimulated by the need to develop an airborne water vapor DIAL with high measurement sensitivity at tropopause height, particularly in case of very dry air from the lower stratosphere. In this 935 nm wavelength range, the line strengths of suitable water vapor absorption lines are more than a magnitude higher than near 720 nm or 830nm. Based on single-frequency, a diode-pumped Nd:YGG laser system or optical parametric oscillator emitting at 935 nm, differential absorption lidar has recently been developed to space borne measures water vapor profile of upper troposphere/lower stratosphere (UTLS) region. DBR diode laser and semiconductor optical amplifier as transmitter, APD as Geiger counter, micro-pulse DIAL for measuring water vapor in the lower troposphere has been developed and validated at field campaigns, and the fourth generation product has been constructed and tested. The application required a single-frequency laser transmitter operating at near infrared region of the water vapor absorption spectrum, capable of being on/off wavelength seeded and locked to a reference laser source for DIAL measurements. The system is based on extended-cavity diode lasers and distributed-feedback lasers. It is achieved by locking the laser wavelength to a water vapor absorption line using compact water-vapor reference cells. or the wavemeter readout for frequencies of laser1 or laser 2 counts as the error signal, product of the error signal and the PID adds as a correction to the applied voltage on the piezo controllers and injection current to tune more stably and smoothly frequencies of the diode laser. Second, precise knowledge of spectral properties of water vapor absorption, laser emission, and atmospheric scattering is necessary. However, to get high accuracy one has to consider methods of treating the problem of Doppler-broadened Rayleigh back scattering and correcting absorption section of water vapor in DIAL experiments. At last, the backscatter signal in the near-field channel rapidly drops to a level at which the results are affected by noise and electromagnetic interference. So the matching of near- and far-field channels in the lower part of the operating range with both detection channels is necessary.
既有的成熟大气水汽观测能力, 对于全球观测系统的运行以及大气详细过程的研究, 是明显不够的。 最常规的观测仍然是无线电探空的在线传感器, 除了存在传感器特性的问题, 也有取样方法的问题。 鉴于水汽时常产生强烈的梯度分布, 来自被动遥感器反演的一些信息, 垂直分辨率特别地不足。
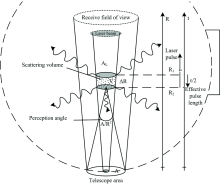
距离分辨的(
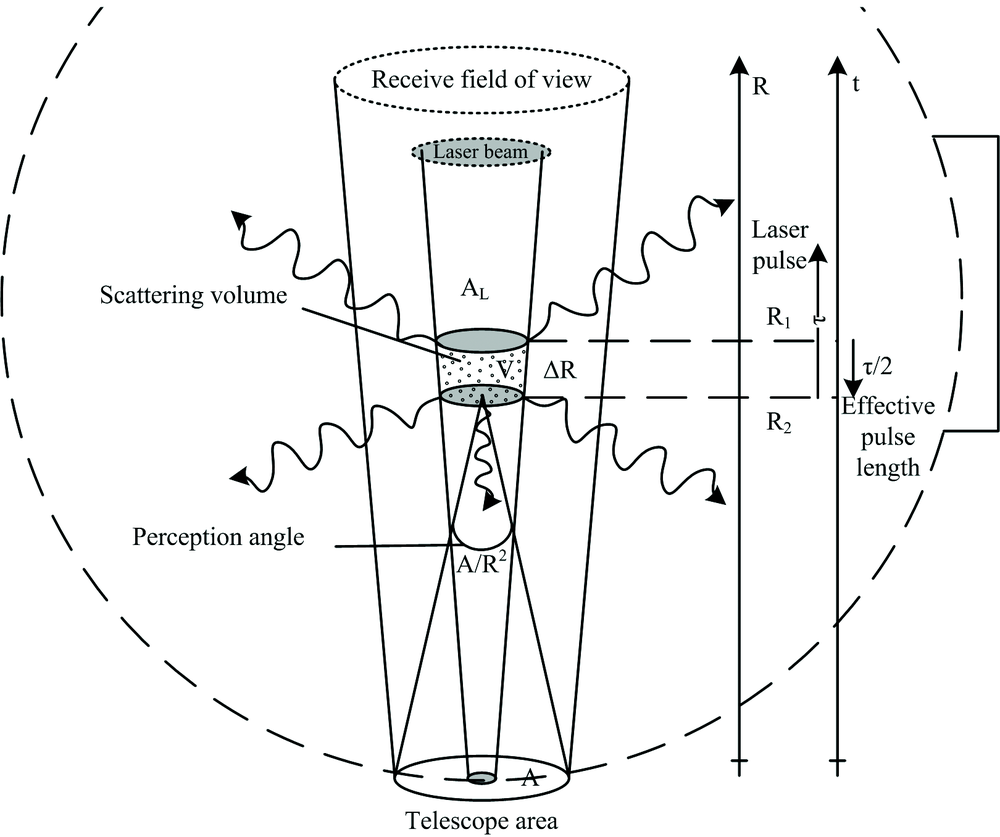 | 图1 激光雷达的几何说明Fig.1 Illustration of the lidar geometry |
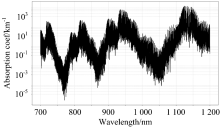
水汽的吸收线分布在好几个红外区域, 对于DIAL工作的最适合的波长在4ν 振动谱段730, 820 nm, 和3ν 振动谱段930 nm附近, 那儿其他气体干扰比较小, 已经发展出合适的激光源, 和灵敏的探测器, 吸收线的强度分布很宽。 图2显示了在标准压力和温度下以及80%相对湿度条件下, 自700~1 200 nm区域水汽的吸收系数[2]。
 | 图2 700~1 200 nm波段水汽吸收系数, 标准大气温度和大气压力, 湿度80%Fig.2 Absorption coefficient of water vapor from 700 to 1 200 nm, standard pressureand temperature, 80% humidity |
早在1979年, Browell等NASA兰利研究中心的科学家, 就以红宝石激光器(ruby)泵浦的染料(dye)激光器(724 nm/150 mJ)为发射机, 建立了地基的大气水汽廓线探测差分吸收激光雷达[3]; 1994年— 1995年NASA兰利研究中心的科学家研究了Alexandrite激光器及其发射波长稳定控制技术, 并据此进一步研究了大气对流层水汽廓线探测的差分吸收激光雷达[4, 5]; 同时期德国马克斯普朗克研究所的科学家也为了同样目的而研究了种子注入的环形腔Alexandrite激光器[6]。
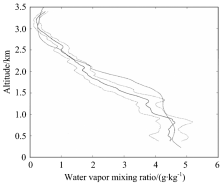
720~730 nm波段最有代表性的差分吸收激光雷达, 当属法国科学家Didier Bruneau等研制的机载差分吸收激光雷达LEANDRE-Ⅱ (图4为系统框图), 可以探测对流层下半部分水汽混合比的廓线, 发射机是一个闪光灯泵浦的Alexandrite激光器, 双脉冲工作, 双波长都位于727~736 nm光谱范围内。 脉冲能量50 mJ, 线宽为2.4× 10-2 cm-1, 光谱纯度大于99.99%, 双脉冲发射之间时间间隔50 μ s。 发射波长由波长计实时监控, 使其绝对精度在5× 10-3 cm-1以内。 接收望远镜口径30 cm, 接收视场3.5 mrad, 滤光片带宽1 nm。 仪器的这些指标保证了激光雷达测量水汽混合比的绝对精度优于0.5 g· kg-1, 在探测高度5 km以下的大气中, 距离分辨率300 m, 100对脉冲回波信号累积平均, 仪器的系统误差小于2%[7]。 0.8 km水平分辨率和300 m垂直分辨率, 测量误差的方差范围从3.5 km高度处的0.05 g· kg-1至近地面处的0.3~0.4 g· kg-1, 和预计的随机误差相符。 与露点湿度计相比, 测量显示出垂直的平均偏差为± 0.15 g· kg-1, 接近等于被观测水汽的变化(见图3)[8]。
 | 图3 飞行高度31 0835UT: 探测水汽混合比(实线) 点线表示加上或减去观测方差; 虚线表示最近区域的在线探测器测量结果Fig.3 Measurements from flight 31 0835 UT: lidar mean water-vapor mixing ratio (solidcurve) Dotted curves, mean value plus or minus the observedstandard deviation; dashed curves, nearest in situ measurement |
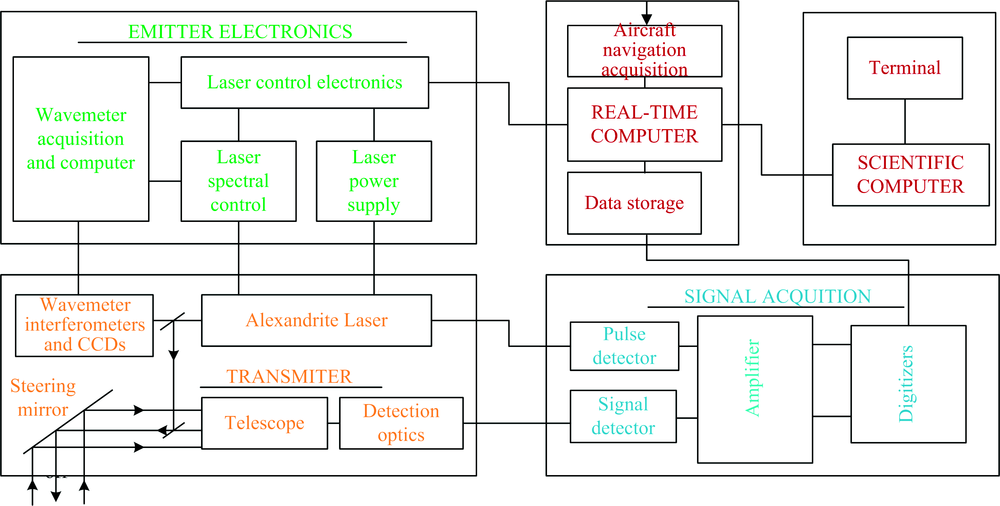 | 图4 LEANDRE Ⅱ 系统组成框图Fig.4 Diagram of the LEANDRE Ⅱ system |
大气水汽在817~820 nm波段有合适的吸收谱线, 钛宝石在该波段有较高的增益系数, 因此德国Hohenheim大学的Gerd Wagner等科学家, 在该波段开发了车载的、 三维扫描的、 基于钛宝石激光器作为发射机的差分吸收激光雷达, 用以探测下对流层大气水汽分布。 动态稳定的、 环形谐振腔, 包括布儒斯特切角钛宝石(Ti: sapphire)晶体, 两边以二极管泵浦的重复频率250 Hz的Nd: YAG激光器二倍频(532 nm)泵浦。 谐振腔采取种子注入技术和相位敏感的主动稳频技术, Ti: sapphire激光器工作在820 nm附近的波长[见图5(a)], 是地基差分吸收激光雷达测量水汽的最佳波长之一。 平均输出功率超过6.75 W, 光束质量因子M2< 2。 指向稳定度< 13 μ rad(
 | 图5 (a) 820 nm水汽吸收光谱, 干涉滤光片的透过率曲线, 截至白天背景光; (b) 激光雷达绝对湿度场分布距离-高度两维扫描图Fig.5 (a)Water vapor absorption spectrum near 820 nm with transmission curves of the interference filters used to block the daylight background in the receiver, (b) Range-height indicator scan of the absolute humidity field measured during the FLUXPAT2009 campaign on 8 September 2009 between 8:48 and 9:12 UTC. The scan speed here was 0.1° s-1. An integration time of 10 s was used for eachprofile resulting in an angular resolution of 1° |
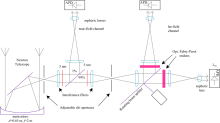
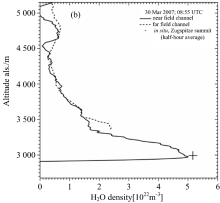
HannesVogelmann等德国科学家2008报道了在Zugspitze山上Schneefernerhaus高海拔研究站建立的差分吸收激光雷达[11], 发射机工作在817 nm附近, 前级为闪光灯单纵模Nd: YAG激光器二倍频532 nm泵浦的、 两个单纵模小脉冲能量Littman光参量振荡器(其波长分别对应参考波长817.223 nm和探测波长817.163 nm), 后级为闪光灯泵浦的钛宝石光放大器[图7(a)]。 近处距离分辨率50 m, 10 km高度处距离分辨率300 m, 脉冲能量可达250 mJ, 通常工作在100~150 mJ之间, 脉冲重复频率20 Hz, 脉冲时间宽度2~4 ns, 每10 000个脉冲回波累加平均。 接收望远镜口径0.65m, 有两个接收通道(图6), 一个负责近场接收(滤光片带宽5 nm), 另一个负责远场接收(滤光片带宽0.5 nm), ϕ 3 mm硅雪崩二极管探测器, 数据采样率20 MHz, 数据分辨率12 bit。 近场接收视场角1.25 mrad× 3 mrad, 远场接收视场角2.5 mrad× 8 mrad。 探测范围为海拔3~12 km, 白天可以探测到10 km高度, 晚上至少可以探测到12 km高度。 与无线电探空仪器相比, 差别在5%以内[见图7(b)]。
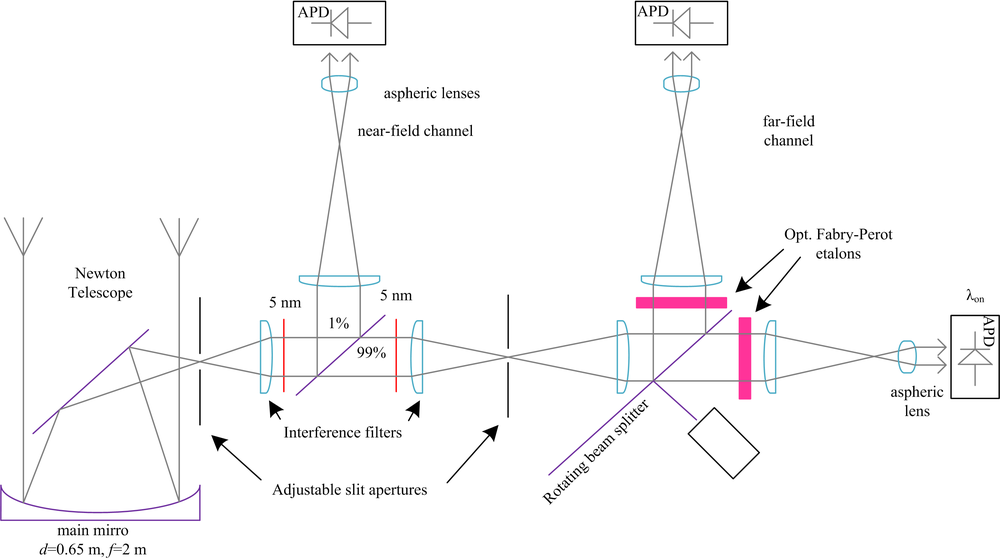 | 图6 Zugspitze水汽激光雷达接收系统Fig.6 Receiver system of the Zugspitze water-vapor lidar |
 | 图7(a) 差分吸收激光雷达发射机Fig.7(a) DIAL transmitter anddaytime measurement under rather humid conditionsin the upper troposphere and an anomalous high tropopause |
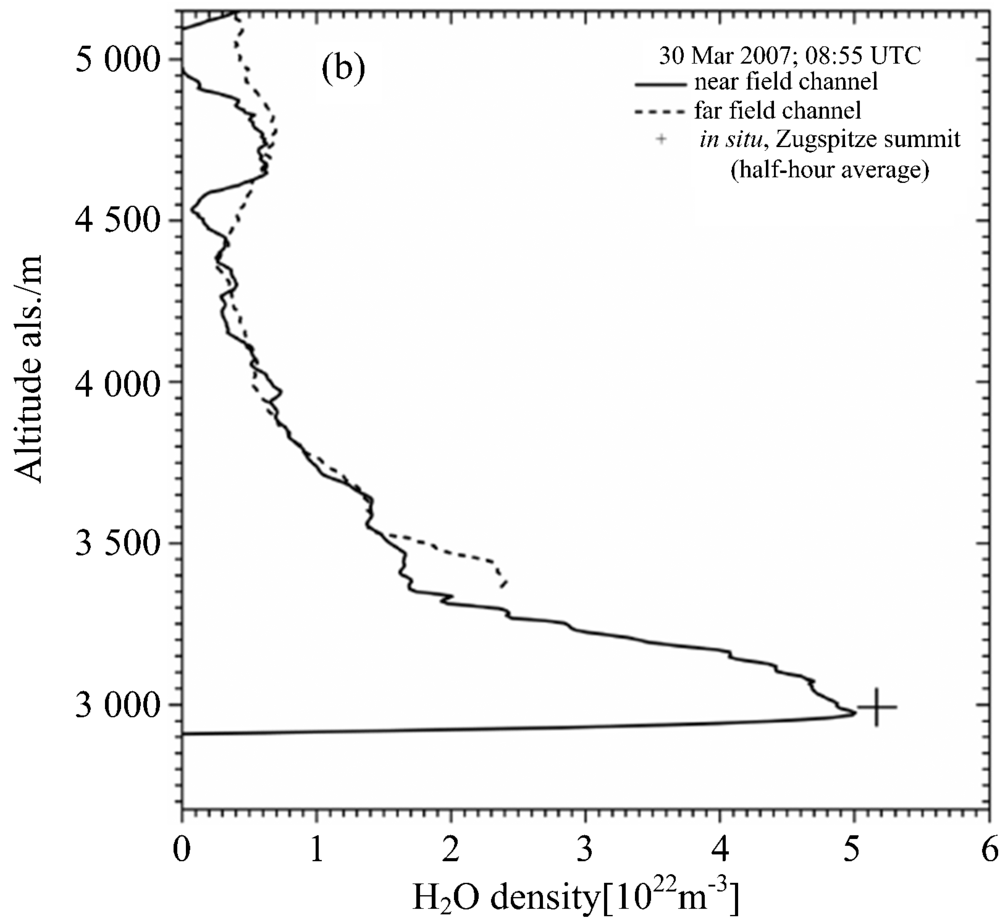 | 图7(b) 白天测量湿度的结果Fig.7(b) Measure results of humidity in daytime |
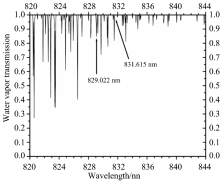
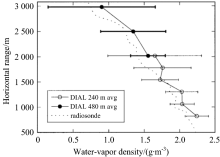
上述差分吸收激光雷达, 脉冲能量高、 脉冲频率低, 成本很高, 对维护人员要求苛刻, 妨碍了它的普及、 推广和商业化, 因此, 早在2004年, 美国科罗拉多大学、 NOAA(National Oceanic and Atmospheric Administration)环境技术实验室的科学家Janet L. Machol领导的小组[12]研制的无人操作、 自动化的微脉冲差分吸收激光雷达CODI, 可以探测对流层大气水汽廓线。 工作在823 nm附近(见图8), 发射机是DFB分布反馈半导体激光器配合半导体光放大器, 脉冲重复频率6~10 kHz, 脉冲宽度600 ns, 脉冲能量0.15 mJ; 接收机配置雪崩二极管盖格计数器(EG& G公司), 接收望远镜35 cm; 滤光片带宽160 pm, 可探测大气水汽浓度的范围0.5~10 g· m-3, 至少15%的精度, 探测距离达到2 km(图9)。
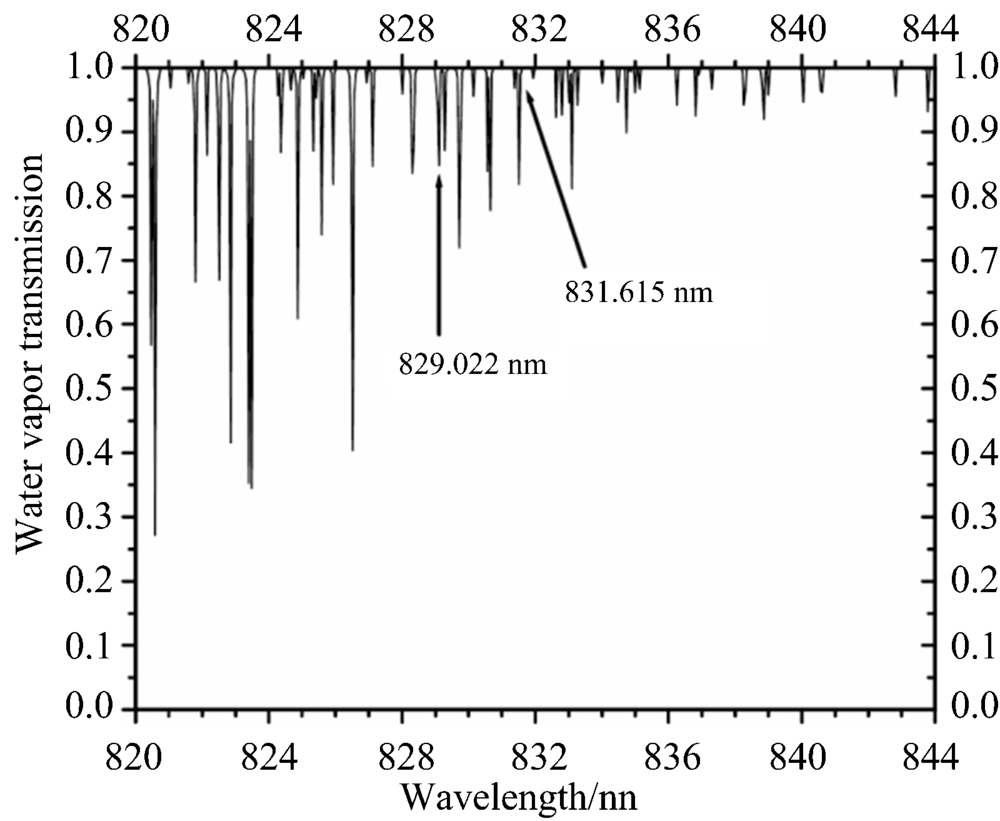 | 图8 用HiTRAN-PC计算通过1 km路径随波长变化的水平透过率Fig.8 A plot of the horizontal path transmission calculated using HiTRAN-PC through a 1 km pathlength as a function of wavelength accessible by the DIAL transmitter |
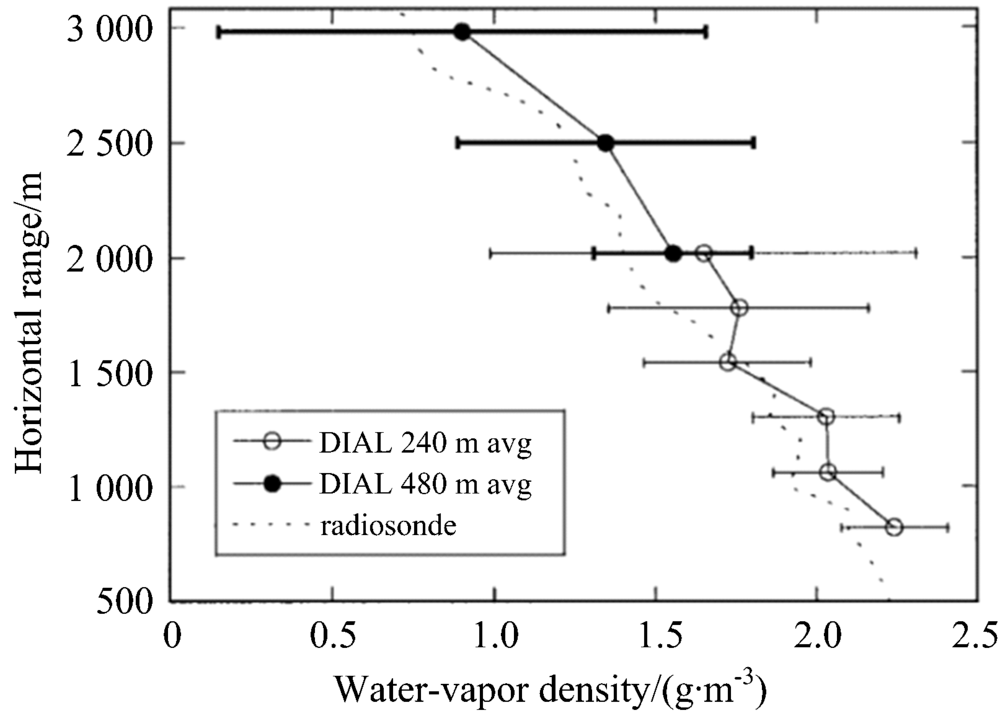 | 图9 2003年3月12日晚上19:04 CODI差分吸收激光雷达垂直廓线和无线电探空所得到的数值, 30 min数据平均Fig.9 Comparison of a nighttime vertical CODI DIAL profile with radiosonde-derived values. Measurements were taken at 19:04 on 12 March 2003. The DIAL data are a 30-minaverage |
2010年澳大利亚科学家AlexDinovitser也在这个波段建立了微脉冲的大气水汽探测差分吸收激光雷达[13, 14], 其发射机Fabry-Perot型二极管激光器, 采用了33 m光程多通道气体吸收池去锁定探测波长online, 用带通微波滤波器将参考波长offline锁定在距离探测波长online线16 GHz的偏频上。 光频可以稳定在1 MHz左右。 脉冲能量300 nJ, 脉冲重复频率3 kHz, 1 μ s脉冲宽度, 接收机包括356 mm望远镜, 和光电倍增管为探测器的光子计数器。
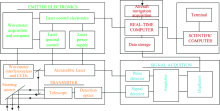
2010年以来, 文献报道了NASA兰利研究中心、 蒙大拿大学和National Center for Atmospheric Research的科学家研制828~830 nm波段的微脉冲大气水汽探测差分吸收激光雷达的进展, 已经发展到第四代产品[15, 16, 17, 18]。 脉冲宽度900 ns~1 μ s, 脉冲能量5~10 μ J, 脉冲重复频率9~10 kHz, 望远镜直径406 mm, 探测波长online和参考波长offline锁定绝对精度± 0.2 pm, 重复性± 0.03 pm。 扩束和接收共用同一个望远镜, 探测器为盖格光子计数模式的雪崩二极管, 探测的水汽的垂直分布如图10所示。 创下了50天时间内无人干预下自动工作的记录。
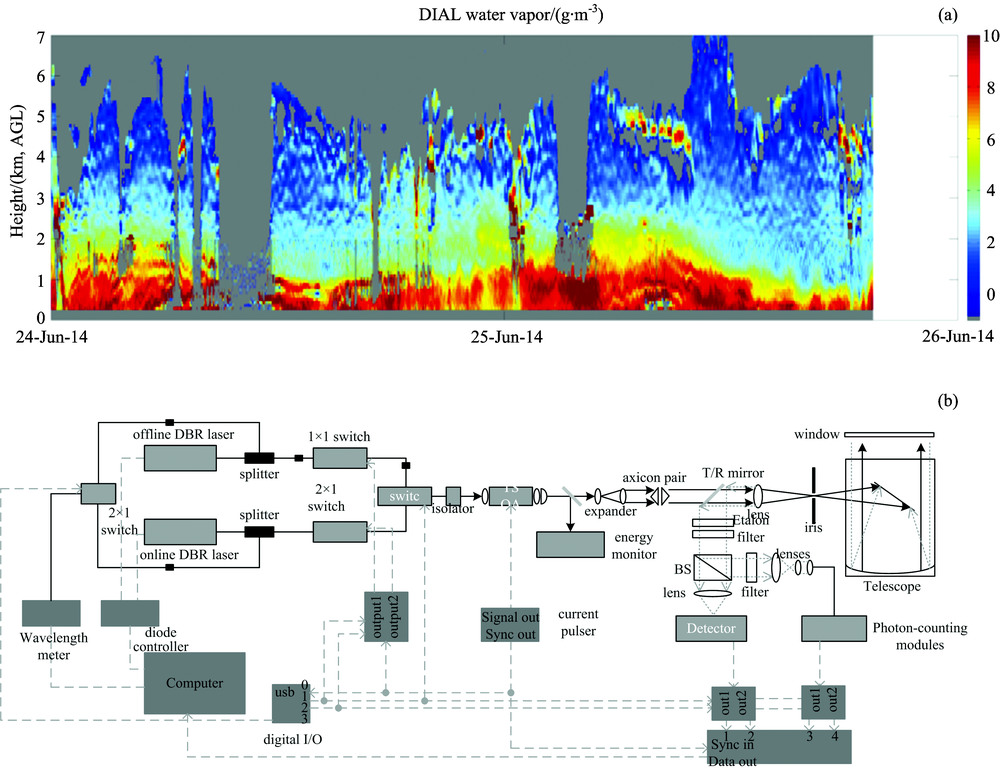 | 图10 水汽探测微脉冲差分吸收激光雷达系统 (a): 地面到云底水汽信号; (b): 水汽探测微脉冲差分吸收激光雷达系统Fig.10 Schematic of the WV-DIAL system (a): Water vapor (g· m-3) showing water vapor signal from the surface up to cloud based without ringing; (b): Schematic of the WV-DIAL system TSOA: Tapered semiconductor optical amplifier; DBR: Distribute Bragg reflectors; T/R: Transmitter/receiver; I/O: Input/output; BS: Beam splitter |
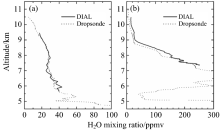
早在1998年, Ehret等德国DLR(Deutsches Zentrumfü r Luft- und Raumfahrt)的科学家就开发了种子注入的Nd: YAG激光器的二倍频532 nm泵浦KTP非线性晶体组成的光参量振荡器[19]。 在935 nm附近输出单纵模窄带的脉冲激光, 用以差分吸收激光雷达探测大气水汽廓线(图12), 不仅泵浦激光用种子注入, 光参量振荡器的谐振腔也用连续波半导体激光种子注入, 这个波段水汽的吸收线比较强(图11), 因此更适合机载飞行试验探测[20], 更有利于对流层上半部分和平流层底部干燥区域大气水汽探测。 935 nm差分吸收激光雷达已经成功地应用于大气边界层水汽通量的研究, 这一水汽差分吸收激光雷达1999年开始运行探测结果如图12所示, 定期在欧洲、 北非、 美国和澳大利亚的各个科学任务之间飞行, 一直到2006年。
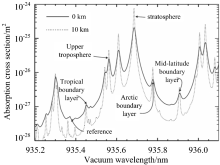
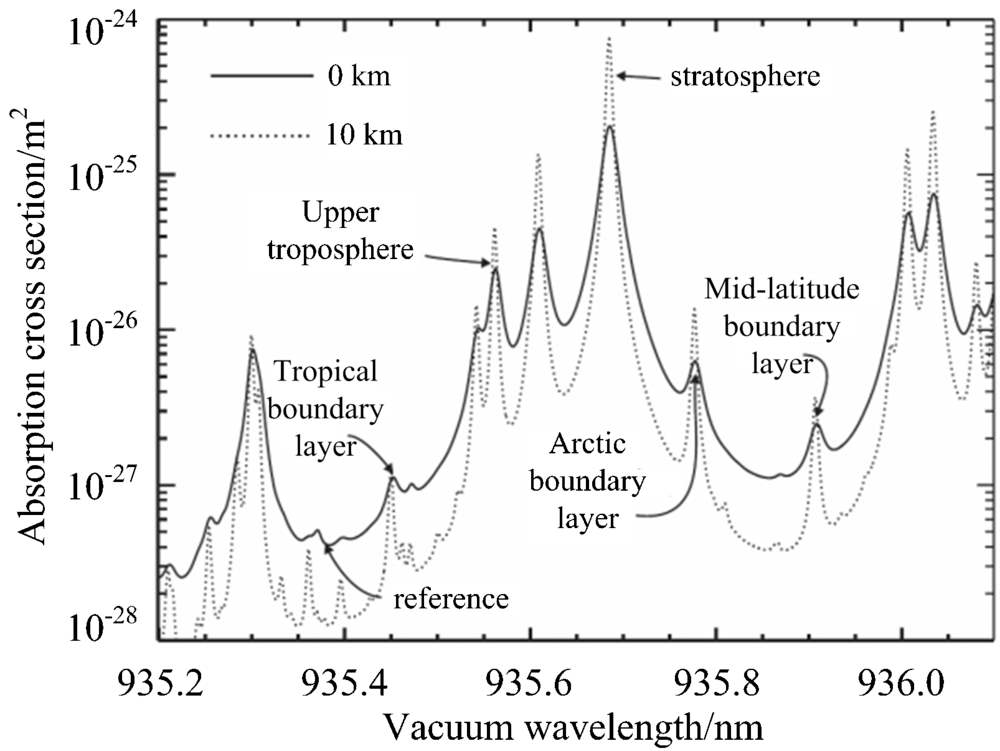 | 图11 水汽的吸收谱线, 吸收截面数据来源于HITRAN 2006, 海平面处和10 km高度处美国标准大气模式下的数值Fig.11 H2O vapor absorption lines. Absorption cross section data calculated from HITRAN 2006 for sealevel conditions and at 10 km altitude usingthe US-standard atmosphere |
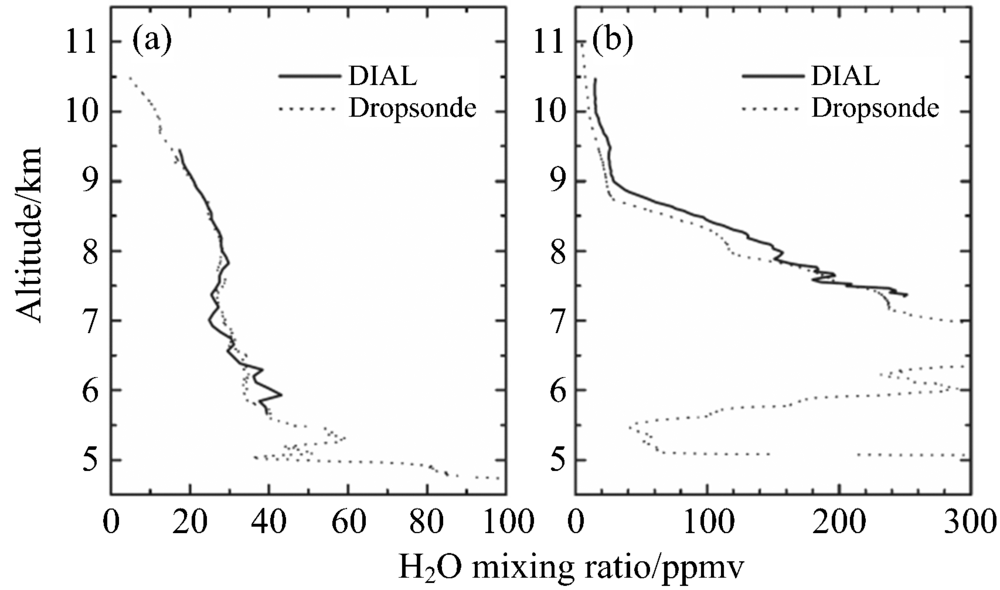 | 图12 差分吸收激光雷达和下投探空仪检测水汽廓线的比较Fig.12 Comparison of vertical water vapor profiles measured by the DIAL and drop sondes |
2009年报道的成果为, 脉冲能量达到45 mJ, 脉冲重复频率100 Hz, 脉冲宽度5.5 ns, 线宽≤ 150 MHz, 光频稳定性< 20 MHz, 光谱纯度99.9%, 借助于高精度波长计作为光鉴频(波长)器, 闭环控制发射机的工作波长。 望远镜口径480 mm, 采样频率10 MHz, 采样精度14 bit, 滤光片带宽1 nm[21]。
Fibertek Inc.公司研发了单频、 波长稳定的935 nm激光发射机[22], 用于NASA 机载水汽差分吸收激光雷达, 这一系统将搭载于ER-2或UAV。 其特色在于用PDH (Pound-Dreveer-Hall)反馈控制环锁定光参量振荡器的谐振腔腔长。 DFB半导体激光器种子注入, 此波段水汽吸收线较强(见图11)。 输出能量3~5 mJ, 重复频率1 kHz, 线宽0.2 pm(68 MHz), 波长稳定性0.1 pm。
除了光参量振荡器而外, 德国Fraunhofer Institutfü r Lasertechnik的科学家Jens Lö hring等[23], 以及Institutfü r Physik der Atmosphä re的科学家Fix等[24], 还在研究基于Nd: YGG(Y3Ga5O12)晶体的全固态激光器, 脉冲能量已经达到30 mJ, 重复频率100 Hz, 光束质量因子M2优于1.4, 脉冲时间宽度52.5 ns。 它的优点是比光参量振荡器更紧凑、 更可靠; 其缺点是调谐范围小, 目前还不能适应不同垂直高度大气水汽浓度差别大, 需要3个不同的波长(1 nm之内)、 分高度探测的特殊性。
2004年, 欧洲空间局ESA公布WALES(Water Vapor Lidar Experiment in Space)空间计划, 2008年, Paolo Di Girolamo等德国和意大利的科学家发表了他们关于该计划的模拟研究结果[25]。 激光器的波长λ 1=935.685 nm, λ 2=935.561 nm, λ 3=935.906 nm, 前面三个波长分别适用于水汽含量不同高度(如图13所示)的探测, 参考波长λ 4=935.852 nm, 脉冲能量需求75 mJ[26]以上, 波长精度要求< 60 MHz, 激光线宽要求< 160 MHz, 脉冲时间宽度< 100 ns, 脉冲(
 | 图13 WALES差分吸收激光雷达发射机以四个不同的波长不同的吸收截面工作Fig.13 The DIAL transmitter of the WALES instrument will operate at four different wavelengths with different absorption cross sections |
(
(2)在理想大气模型里, 分子运动速度呈现麦克斯韦分布, 来源于大气分子的Rayleigh后向散射总会表现出相当明显的 Doppler展宽, 它可以与水汽吸收线的宽度相比拟, 不能忽略[11]。 需要仔细考虑水汽吸收光谱和大气分子Rayleigh后向散射光谱的线型, 对吸收截面σ on和σ off加以必要修正。 水汽的吸收截面还受到大气温度、 大气压力的影响, 即在不同高度吸收截面要给出不同的数值。
(3)水汽是大气中随高度变化梯度最大的组分, 水汽绝大部分都集中在边界层, 含量随高度上升大幅度衰减, 超过对流层之后, 更是衰减为很小的浓度。 它在大气中的混合比随高度变化极大, 回波的分通道检测十分必要, 近场通道检测水汽浓度特别大的底层大气回波, 远场通道再检测其他高度的大气回波。
(
(2) 如同大气气溶胶分布, 大气二氧化碳的浓度, 若国际气象组织或其他国际合作组织建立全球水汔观测网络, 那么830 nm波段的微脉冲差分吸收雷达将是最好的选择, 因为微脉冲激光雷达人眼安全、 功耗低、 无需人员值班、 价格相对低廉, 符合广域化、 网络化布置的要求, 对于大气边界层物理的研究具有鲜明的科学价值。
(3) 在空间对地观测方面, 卫星平台上或者空间站上布置水汽差分吸收激光雷达, 显然930~940 nm波段差分吸收激光雷达比较合适, 因为这个波段可以安排多个相近的波长、 吸收截面的数值呈梯度化分布, 符合大气水汽不同高度浓度差别化的要求, 观测对流层顶-平流层底水汽的交换对于全球变化研究尤其具有重大科学意义。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|