

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
无人机视角下的林木爆燃火特性研究
[吕振义1  , 何诚
, 何诚2, * , 舒立福3, * , 纪任鑫4 , 张思玉2 , 王越2 , 高建琦1 , 赵凤君3 ]
, 何诚, 舒立福, 纪任鑫|
|


森林火灾“爆燃”现象的特征是突然发生的高强度、 高蔓延速度的燃烧。 目前为止, 关于“爆燃火”的原因还没有达成共识。 以无人机视角下对林木爆燃火特性研究, 以四川木里特大森林火灾为研究对象, 通过分析凉山州某森林扑火部队3月31日木里森林火灾当天KWT(科卫泰)无人机航拍火场画面, 结合无人机实时影像及实地调研数据, 分析了峡谷地形林火蔓延时空特征, 探讨了峡谷中风向风速变化时空分布规律, 研究了地形变化条件下, 不同海拔高度风速特征, 建立了无人机倾角测量风速模型(其中为风速m·s-1, 为无人机倾角°)。 结果表明, 高山峻岭特殊地形环境下每天4:00—12:00时间段为静风期, 为峡谷林火扑救最佳时期; 午后15:00—17:00和晚上20:00—22:00为山谷地形风速活跃期; 仿真软件数据显示山顶、 谷底与山腰不同海拔位置的风速风向不统一, 谷底会产生乱流现象, 且风速与海拔不存在正相关关系, 小气候在复杂地形中占主导影响地位; 在谷口至山谷深处的中间位置会出现气流速度的波峰状态, 并易形成乱流, 为爆燃火发生提供了客观必要条件。 该研究可为复杂地形环境下, 森林草原火灾扑救安全提供数据和技术支撑。
, HE Cheng, SHU Li-fu, JI Ren-xinBiography:LÜ Zhen-yi, (1963—), industry professor in Shenzhen KEWEITAI Enterprise Development Co., Ltd. e-mail:Lzy139029@keweitai.tom
The phenomenon of “deflagration” in forest fires is characterized by a sudden occurrence of high-intensity combustion with high spreading speed. Consensus hasn’t been reached about the causes of “detonation fire” so far. In this study, forest fire videos, real-time pose data, and wind speed estimation derived from KWT (Keweitai) drone, together with field research data were analyzed to characterize the spatial and temporal feature of forest fire spreading within a valley topography in Liangshan Prefecture, which killed 27 firefighters on 31 March 2019. We found that:the microclimate played a dominant role in complex terrain, and the special period of the high mountain terrain was 4:00—12:00 every day for the quiet wind period, which was the best period for the canyon forest fire fighting. The wind speed of the valley topography was active from 15:00—17:00 in the afternoon and from 20:00—22:00 in the evening, the model of relationship between inclination angle of the drone and wind speed was established y=-1.043 5+1.150 1 x( y is the wind speed m·s-1, and x is the uav inclination °) . The wind speed and direction of the mountain, valley and mountainside were not uniform, and there was no positive correlation between wind speed and altitude. The peak state of the airflow velocity occurred in the middle of the valley to the depth of the valley, and there would be turbulent flow at the bottom of the valley, which provides objective and necessary conditions for the occurrence of deflagration fire. The short duration of drones was the bottleneck of forest fire monitoring.
At present, domestic and foreign scholars have done some researches on the characteristics of forest fire spreading in mountain valleys. Balbi found that forest fires at low altitudes could quickly ignite high-altitude combustibles[3]. In this case both surface and canopy fires would occur and lead to an abruptly increased flame height with accelerated energy release and propagation speed, leaving little buffering time for the transition from an ordinary forest fire into forest deflagration[4]. The data survey shows that the spread rate of forest detonation fire is 540 m· s-1 at the temperature above 1 500 ℃, but there are no official data reported at the maximum temperature[5, 6]. The hot gas and associated heat generated in the combustion enhance the air instability, increase the wind speed, and release flammable volatile gases from the plant in the fire field, therefore further increase the burning rate. Studies by Mason and Wheeler show that in forest fires, the density of volatile organic compounds present in the lower part of combustibles is greater than the density of air[7]. In valley topography, it can settle to the bottom of the canyon. It is an inert gas that produces a mixture of flammable substances under the action of high temperature heating, so it can cause an explosion when hits a fire source. Lu et al. carried out a forest fire burning experiment by simulating the canyon topography on an artificial experimental platform[8]. The experimental materials used mixed combustibles similar to forest vegetation. During the experiment, the factors such as slope gradient and wind speed were changed to observe the forest fire propagation process and the law of smoke movement and temperature variation. Ma carried out pyrolysis analysis experiments on several common tropical plants (namely mango tree, eucalyptus, yellow skin, fake betel nut, yam, palm, plantain, bauhinia, canna)[9]. The flashing characteristics of combustibles were analyzed by Lechteilier’ s rule, and the kinetic equation of pyrolysis reaction was established. He summed up the regularity of the actual fire occurrence characteristics, analyzed the characteristics of the fire and spread of forest fires in the alpine valley, and proposed the corresponding rescue strategy[10].
Real-time dynamic monitoring of forest and grassland fires could provide key information for developing right firefighting strategies. The current monitoring methods, such as satellite monitoring, aviation monitoring, watch tower monitoring and ground patrol, have their own advantages and disadvantages and applicable conditions[11]. Aviation fire protection includes not only piloted helicopters and fixed-wing aircraft, but also unmanned aerial vehicle (UAV, referred to as drones). With the rapid development of drone technology, the UAV aerial remote sensing system plays an important role in fire emergency rescue, owning to its unique advantages, such as flying under the clouds, working in high-risk areas, being real-time and flexible, high image resolution, low cost and so on. He et al. obtained the forest fire information through the multi-rotor drone, proposed the method of obtaining the fire point coordinates with high precision, and the advantages of rotor UAV in information extraction in fire field were demonstrated with data validation[12].
In view of the lack of researches on the characteristics of forest fires, this paper takes the case of the extra-large forest fires in Liangshan Prefecture, Sichuan Province as the research object. Based on the real-time data of forest fire spread acquired by drones, Google topographic map and field survey data, the characteristics of forest deflagration were analyzed, and the connections between topography, climate and forest fire occurrence were studied. The characteristics of forest fire occurrence under the special terrain of alpine valley were summarized, as well as the influencing factors of deflagration fire, and the possibility of deflagration fire in complex terrain environment was quantified. Theoretically, the correlation between forest deflagration fire occurrence and natural conditions such as topographic climate was illustrated.
1.1.1 Performance profile of drones for collecting data
Judging from the arm of the drone screen, the drones deployed by the Mu Li County fire prevention team were the first batch of KWT-X6M models purchased at the end of 2015. The drone can work for 50 minutes in the low attitude area. When it works on the plateau environment (4 000 m), it’ s working time is reduced by about 15% (if the altitude is 5 000 meters, the loss is 25%, measured on the plateau). In the case of winds speed up to 13.917.1 m· s-1, the endurance loss is more than 20%, and the energy of the battery will
 | Fig.1 Data acquisition UAV model KWT-X6M |
also decrease 20% with the 100 times recharging cycles. So, the actual effective flight time is about 28 min.
1.1.2 Data acquisition and analysis
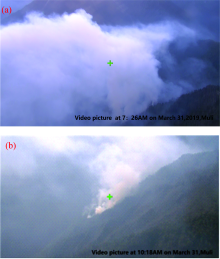
Fig.2 is a screenshot of the fire scene image obtained by the drone on the morning of March 31, 2019. The following information can be obtained from the image.
(1) At 7:26 am when the wind is small, the smoke is very thick. Because the wind is small, (the wind speed can be visually measured by the video is about 0.3~1.5 m· s-1), the smoke gathers at the bottom of the valley, and the visibility is low, only smoke can be identified, but the number and location of fire points cannot be found.
(2) At 10:18 am, the image of the fire scene reconnaissance from the drone is analyzed. The wind becomes larger and the smoke is still thick. The driver makes the drone to the side position to watch the fire point and the smoke more clearly by the drone camera.
(3) From the image analysis of the fire scene reconnaissance from the drone at 12:07 pm and 14:57 pm, the wind becomes large and the smoke is quickly dissipated. The drone is shot from the side to see the location of the fire point more clearly. The wind is close to the hillside, the wind direction is unstable, and the wind speed is increasing with time.
Through the image analysis of the fire field reconnaissance in the morning, the situation of the fire in the canyon is analyzed from the perspective of wind speed. In the morning, the wind speed is low. As time goes by, the wind speed increases and the overall wind speed is stable, so the flight of the drone is safe. The fire intensity is waking, the type of forest fire is surface fire, and the spread speed is low. This period can be defined as a quiet wind period.
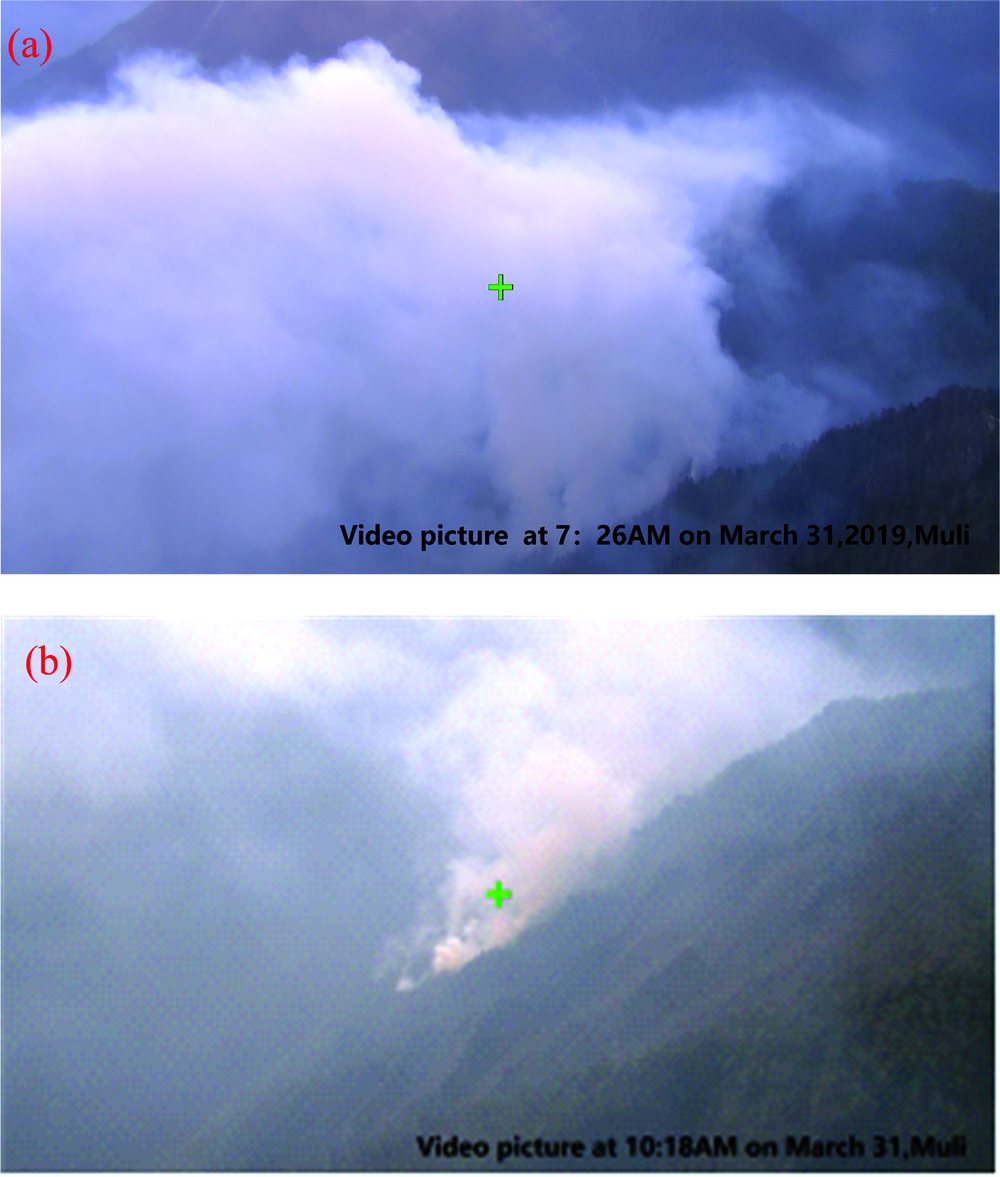 | Fig.2 Aerial capture of the scene of the fire on the morning of March 31 |
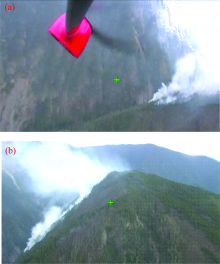
Fig.3 is a screenshot of the scene of the fire taken by the drone on the afternoon of March 31. The following information can be obtained from Fig.3(a) There is a chaotic wind field in the afternoon, and the drone swings seriously. From the amplitude of the swing of the drone wing, it can be discerned that the wind speed is about 20 m· s-1, and this data is the wind speed of the flying height of the drone. There are no specific data of wind speed at the bottom of the valley, but it can be judged by the direction of the smoke. At this time, the smoke is moving close to the surface of the mountain, so the visual wind speed is about 12 m· s-1, which is much larger than the one in the morning.
 | Fig.3 Aerial capture of the scene of the forest fire at about 15:00PM on March 31 |
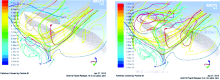
The ANSYS software was used to simulate the wind field distribution of the valley where the forest fire happened in Muli County, March 31, 2019. First, the data of the Google map at the fire scene shown in Figure 1 were vectorized and input into the ANSYS software.Tie image data acquired by the drone are shown in Fig.4. There are two wind directions at the top and bottom of the fire:(1) the wind above the mountain is the southwest wind; (2)the wind inside the canyon is the northeast wind, two convective winds. According to simulaton of the scene climate scene, taking the wind speeds of the two main wind directions as the independent variables, the ANSYS software simulates the wind movement to see the wind speed at different altitudes.
Accoding to the forest fire principle and meteorology principle, ANSYS software is used to analyze the relation of the inside wind distribution on the valley side with the certain boundary condition and certain input signals.The simulating results are shown in Fig.6:the fire spread form of the valley topography is greatly affected by the valley wind and mountain wind. Both belong to the way of radiating motion of hot air mass. In principle, the air motions belong to the vertical movement, combined with the air movement in the valley itself, which can lead to unpredictable wind direction. Valley winds have certain laws, including gust characteristics. During the alternate process of mountain wind and valley wind, there will be a certain static wind period, generally between 4 am and 12 am; mountain winds and valley winds also have active periods, usually 15:00— 17:00 in the afternoon and 20:00 in the evening. As the wind speed increases during this period, it will directly affect the way where the forest fires move. The surface fire is easy to develop into a canopy fire, and the underground fire and other smoldering fires are easy to develop into open fires such as surface fires. The probability of occurrence of special fire behaviors such as rushing fires and similar deflagration fires increases. From the perspective of meteorology, the movement of the valley wind is affected by the change of the climate (Viegas and Pita 2004; Dold et al. 2011). In the case of the overall law, there will be inter-day changes, and the daily wind speed is also different. This makes it possible to grasp the changing laws of the local valley winds, which is crucial for fire efficiency and safety.
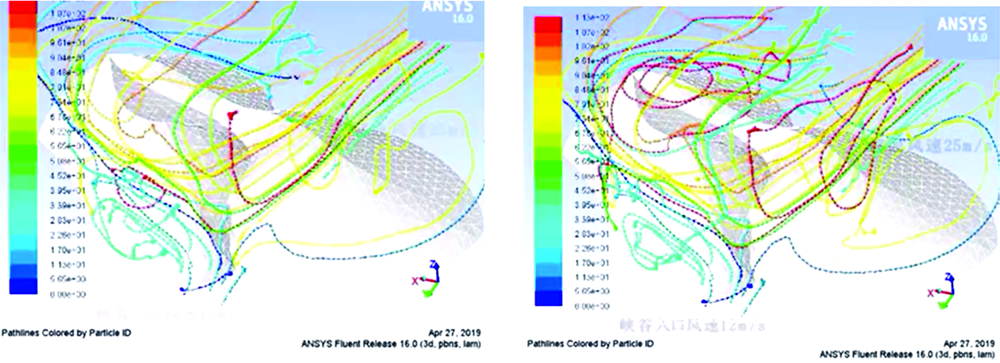 | Fig.4 Scene diagram of wind speed and direction change of forest fire site in Muli county simulated by ANSYS software |
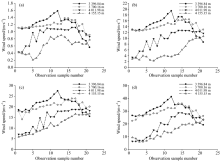
As shown in Fig.6, the forest fire scene in Muli County was analyzed and three-dimensional reconstruction was carried out by ANSYS software to obtain a three-dimensional map of the forest fire scene in Muli County. In order to understand in detail the relationship between different locations and altitudes of the valley on wind speed and wind direction, we selected observation samples from four altitudes in the software. The four altitudes were 3 396.84, 3 701.16, 4 011.98, and 4 155.15 m. On each elevation plane, 21 samples were selected from the valley to the deepest point of the valley (as shown in Fig.6), and the distance between the 21 plots was equal, with an interval of 145.3 m. From the entrance of the canyon to the deep side of the canyon, the numbers were 1, 2, 3, …, 21, and the two air inlets of the 3D map of the forest fire scene were set in the ANSYS software. That is, the northeast winds at the entrance to the canyon and the southwest wind at the top of the mountain. These two directions of wind were based on actual observations by drones. In the software, it is assumed that the four wind speeds of the two air inlets are 1, 12, 17, and 25 m· s-1, respectively. The software records in detail the wind speed at different locations at each wind speed, as shown in Fig.5.
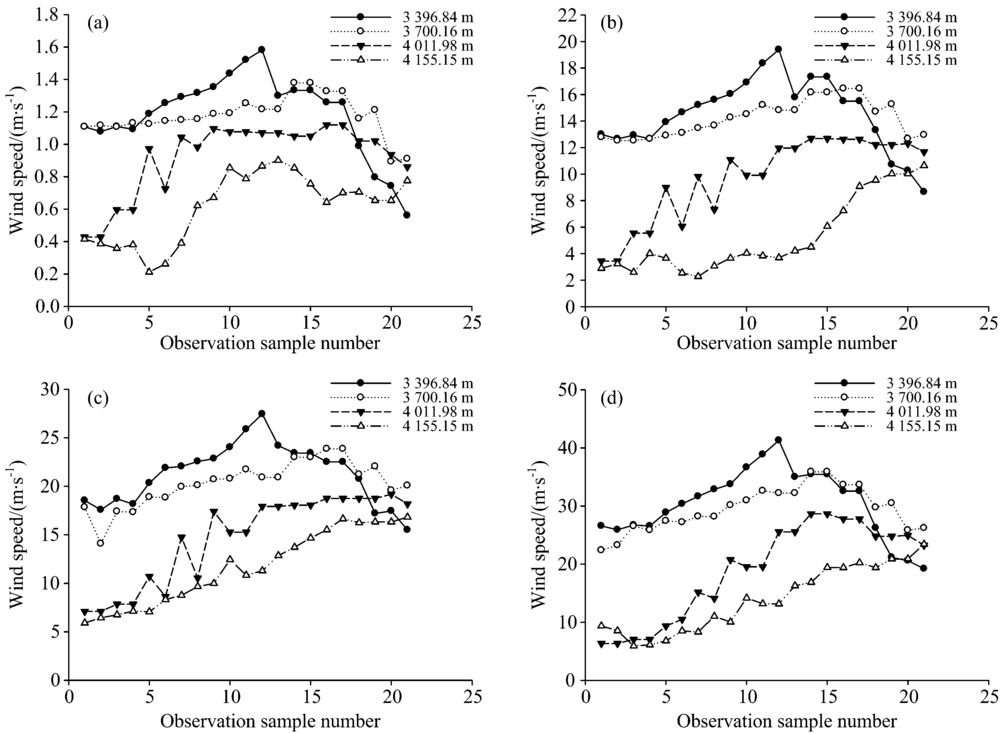 | Fig.5 Wind speed diagram of sample points observed under 4 different wind speeds of inlet in the two directions of canyon mouth and mountain top (a):Wind speed diagram of the observed; (b):Wind speed diagram of the observed sample at a sample at a wind speed of 1 m· s-1 wind speed of 12 m· s-1; (c):Wind speed diagram of the observed sample at a wind speed of 17 m· s-1; (d):Wind speed diagram of the observed sample at a wind speed of 25 m· s-1 |
The wind speed map of the sample is observed in four different wind speed scenarios through the inlets of the canyon and the mountain. The research on Simulation shows that the air inlets in the two directions of the canyon and the mountain top can reach the following conclusions through 84 observation points at different locations:(1) As the altitude increases, the influence of the wind weakens. Observation points close to the surface elevation are most affected by the canyon and the summit. (2) The change in wind speed response of the near-surface observation points that the forest fire fighting department is concerned about. From Fig.6, it is found that the observation points close to the surface are at the same altitude, and the corresponding response is different because the location is different from the valley mouth and the valley. The performance characteristic is that the observation points from the valley mouth to the deepest part of the valley, and the peak state at the middle position. The wind speed will suddenly increase at the middle position, and decrease at the deepest point in the valley. This coincides with the location of the deflagration fire in Muli County, Liangshan Prefecture, Sichuan Province. (3)When the northeast wind at the bottom of the canyon mouth meets the southwesterly wind at the west side of the mountain top, it will form a turbulent and abrupt microclimate in the canyon or on the slopes on both sides of the canyon. These windy microclimates are the most dangerous and even lethal to firefighters. (4) It is found in Figures 7(c) and (d) that when the wind speeds in both directions of the canyon mouth and the mountain top are larger, the wind speeds at the high altitude observation points above the canyon mouth are relatively small, which are significantly different from those at the low altitude observation points.
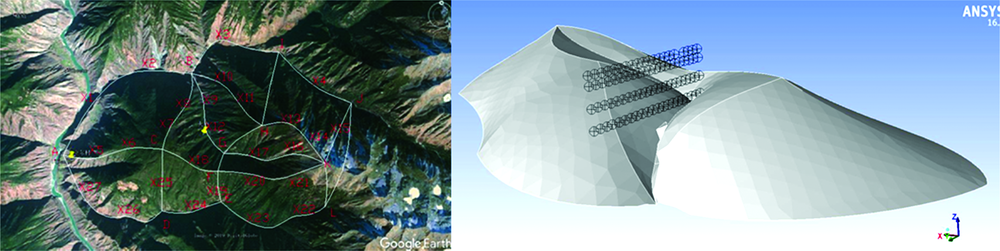 | Fig.6 3D modeling of forest fire site and layout of observation samples |
From the perspective of meteorology, the movement of the valley wind is affected by the change of the climate. In the case of the overall law, there will be inter-day changes, and the daily wind speed is also different. This makes it possible to grasp the changing laws of the local valley winds, which is crucial for fire efficiency and safety.
(1) The climatic characteristics of the special terrain of the high mountains are characterized by a static wind period from 4:00 to 12:00 every morning, which is the best time for the canyon forest fire. The open flame spreads slowly, and can be extinguished by blowing, fluttering, sawing, digging, pouring, etc. with the heat wave temperature in the category that people can access. In addition, high-pressure water mist and other fire-fighting equipment can be used to clean up the dark fire, and the drones are equipped with fire-fighting equipment to extinguish the forest fires that are difficult to access.
(2) In the special terrain of the mountains and mountains, the wind begings to increase in the afternoon. The wind speed is active during 15:00— 17:00 in the afternoon and 20:00— 22:00 in the afternoon, and the local wind speed can reach above 17.2~20.7 m· s-1. Moreover, the wind speed and direction of the mountain, valley and mountainside are not uniform, and a microclimate phenomenon will occur at the side of the valley, and there will be turbulent flow as well. The speed of fire spread will be accelerated by the increase of wind speed, which will provide conditions for the fire to turn into an open flame, the spread of surface fire into a canopy fire, deflagration fire, flying fire and other special fire behaviors.
(3) At present, no matter the industrial-grade UAV or the consumer-grade UAV has short battery endurance, and is not able to monitor for a long time. In the Muli County forest fire monitoring process, since the drone must land and get its battery replaced after half an hour flight and it takes time to recharge the battery, the drone only obtained an image of the fire one hour before the deflagration. When the detonation occurred, the drone did not take off due to the battery replacement. So, the high-altitude image at the time of deflagration was not obtained. It is a great loss for the theory study of deflagration. It is certain that the drone’ s endurance and the ability of working in strong wind on the plateau are very important. These specifications show the obvious difference between the industrial drones and the consumer drones.
(4) Special terrain such as valley high altitude, the velocity of air flow in each region is different, the peak state of the airflow velocity occurs in the middle of the valley to the depth of the valley, and it is easy to form turbulent flow, providing objective and necessary conditions for the detonation fire. The time-dependent and unexpected turbulent flow is most dangerous to the forest fire fighters!
The big helicopters or manned aircraft are far more limited than small drones. At present, the aircraft used for fire rescue in China does not have the night flight function, and very few models are capable of flying for high altitude terrain environments above 4 000 m. In the case of wind speed of higher than 8.0~10.7 m· s-1, a manned aircraft is not allowed to take off. Once forced to take off, if an accident occurs, the disaster is even more serious. In the case of the Muli forest fire, in the case of moment wind speed of 17.2~20.7 m· s-1 and at an altitude of 4 000 meters, small UAV has obvious advantages in the fire detection in air. In the case of manned helicopters, the probability of a crash caused by a harsh flight environment is high.
In view of the current situation of the use of existing drones in forest fire monitoring, some suggestions for improvement are proposed to expect small drones to be more competent for forest fire prevention. Suggestions for improvement are as follows:Current drones do not have the ability to accurately measure wind speed, direction and warning, nor can they provide real-time alarms for current extreme weather. The current UAV reconnaissance lens are powerless for smoke, and it is very important to detect the actual temperature of the mountain surface through the smoke. In some consumer drones, in the case of low temperature plateaus, optical lenses are prone to fog failure. Maybe dual-light and three-light pan/tilt are effective solutions. It is recommended that for the drone reconnaissance image, when transmitted to the ground station, it is also best to transmit it to the firefighter’ s mobile phone in real time. The first-line firefighters can know their position and the location of the fire point in real time in the forest, and grasp the development momentum of the fire field in real time. For the small drones, under the premise of ensuring easy carrying and rapid deployment, the load capacity of the drone can be improved, and a certain amount of fire extinguishing bombs or water tanks can be mounted to realize intelligent forest fire disposal. Increasing the UAV-equipped sensor, while the UAV is in the air for reconnaissance, it can also take into account the relay function of wireless communication, and realize the reliable communication from the commander to the firefighters in the fire field.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|