







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于RGB-NIR图像匹配的作物光谱指数特征可视化分析
[孙红 , 邢子正, 张智勇, 马旭颖, 龙耀威, 刘宁, 李民赞
, 邢子正, 张智勇, 马旭颖, 龙耀威, 刘宁, 李民赞* ]
, 邢子正, 张智勇, 马旭颖, 龙耀威, 刘宁, 李民赞]
|
|


作者简介: 孙 红, 女, 1980年生, 中国农业大学信息与电气工程学院副教授 e-mail: sunhong@cau.edu.cn
归一化植被指数(NDVI)基于可见光的红色波段(630~680 nm)和近红外区(780~1 100 nm)的反射光谱进行计算, 被认为是作物营养与长势诊断的重要指标。 为了低成本、 快速、 无损的检测作物叶绿素含量, 计算植株的NDVI并呈现作物的NDVI分布情况, 并通过不同角度图像的分析, 监测作物营养分布与动态。 利用可见光和近红外波段双目成像技术获取图像, 在讨论可见光(RGB)和近红外(NIR)图像的匹配算法的基础上, 经图像分割与光照影响校正后, 针对不同测试角度建立了作物植被指数空间分布图, 并对其空间分布特征与影响因素进行了可视化分析。 试验利用可见光和近红外双目相机对51株玉米植株, 分别在90°, 54°和35°视角下同步采集RGB和NIR图像。 对RGB和NIR图像分别进行高斯滤波和拉普拉斯算子增强预处理后, 选取了SURF, SIFT和ORB共3种图像匹配算法, 并首先利用其进行RGB-NIR图像匹配对齐, 以匹配时间(Time), 峰值信噪比(PSNR), 信息熵(MI)和结构相似性(SSIM)4个参数作为匹配性能评价指标, 分别从时间、 准确性、 稳定性三个方面综合确定最优匹配方法。 其次, 研究玉米植株的分割方法包括超绿算法(ExG)和最大类间方差算法(OTSU), 分别实现图像中作物和背景的分离, 提取分割后的RGB图像R(Red), G(Green), B(Blue)分量和NIR图像分量。 基于HSI颜色模型, 提取I分量讨论了光照对图像的影响, 并利用多灰度级标准板建立了植株光谱反射率校正线性公式。 然后, 利用R(Red)和NIR图像分量计算图像中每个像素的NDVI值, 绘制作物植被指数的空间分布图, 从而对比分析了不同拍摄角度下光谱植被指数的分布特征。 通过不同角度图像的NDVI分布情况, 展示监测作物植株不同位置的叶绿素分布情况。 结果显示, RGB-NIR图像匹配时间SIFT(1.865 s)>SURF(1.412 s)>ORB(1.121 s), 匹配准确性上SURF≈SIFT>ORB, 匹配稳定性上SURF>SIFT>ORB, 综合比较选取SURF为最优匹配算法。 采用4灰度级标准板对R, G, B, NIR分量校正模型的 R2分别为0.78, 0.76, 0.74, 0.77。 90°和35°视角分别展现了作物叶和茎的NDVI植被指数分布情况, 可为分析和监测作物的营养分布提供技术支持。
The NDVI (Normalized Difference Vegetation Index) calculated based on the spectral reflectance is proved as one of the important parameters to estimate the chlorophyll content of crops, which indicates the growth condition of crop quickly and nondestructively. Thus, the distribution of NDVI of crops can be studied by the binocular stereo vision system with visible RGB (Red, Green, Blue) and near infrared (NIR) images. And the NDVI distribution and dynamics of crops are monitored through the image analysis at different angles. After the spatial distribution maps of crop vegetation index were established based on the matching of RGB and NIR images, the spatial distribution characteristics and influencing factors were discussed by the visualization of NDVI. The RGB and NIR images of 51 maize plants were collected synchronously by the binocular stereo vision system at 90°, 54°, 35° respectively. The RGB-NIR images were pre-processed by Gauss filtering and Laplace operator enhancement. Firstly, three algorithms, namely, SURF (Speeded-Up Robust Features), SIFT (Scale-invariant Feature Transform) and ORB (Oriented Brief), were studied and discussed for RGB-NIR image matching and alignment. Four evaluation indices wereused to determine the optimal matching methodfor RGB-NIR image matching and alignment, including matching time, PSNR (Peak Signal to NoiseRatio), MI (Mutual Information) and SSIM (Structural Similarity Index). Secondly, the crop and background were segmented by using ExG (Extra Green) algorithm and Maximum Interclass Variance algorithm (OTSU). The R (Red), G (Green), B (Blue) and NIR components of the segmented RGB images were extracted. The influence of illumination was discussed and Spectral reflectance was corrected based on the I component of HSI (Hue-Saturation-Intensity) color model. Then, the NDVI of each pixel in the image was calculated, the spatial distribution map of crop vegetation index was drawn, and the distribution characteristics of NDVI under different shooting angles were compared and analyzed. The NDVI distribution was used to display the chlorophyll distribution of crop plants. The RGB-NIR image matching results showed that the matching time with SIFT (1.865 s)>SURF (1.412 s)>ORB (1.121 s), the matching accuracy with SURF≈SIFT>ORB, and the matching stability with SURF≈SIFT>ORB. According to discussion results, the SURF algorithm was selected as the optimal matching algorithm. In order to eliminate the influence of ambient light, the image reflectance was corrected by 4 gray level standard plates on the basis of discussing the I component and gray histogram of HSI model. The R2 of R, G, B and NIR component correction models were 0.78, 0.76, 0.74 and 0.77 respectively. The vegetation index distributions of leaves and stems of crops were presented from 90 and 35 angles, which could provide new technical support for analyzing and monitoring the nutritional status and distribution of crops.
叶绿素含量是玉米作物生长与营养状态的重要指标, 是实现作物生育期精确管理的重要评价依据[1]。 传统的化学分析方法, 需破坏性采样, 耗时耗力, 不利于快速检测。 光谱技术作为一种快速无损检测技术被广泛用于作物生长状态的监测。
归一化植被指数(normalized difference vegetation index, NDVI)基于可见光的红色波段(630~680 nm)和近红外区(780~1 100 nm)的反射光谱进行计算, 因其对作物叶绿素含量、 氮素含量呈显著相关关系, 被认为是作物营养检测的重要指标[2]。 快速高效地获取并分析作物NDVI光谱植被指数分布与状态, 可为作物长势监测提供重要依据。
作物空间光谱主要包括高光谱和多光谱两大类。 高光谱成像数据光谱分辨率高, 但设备价格昂贵。 在目标检测时, 通常需要通过挑选特征波长构建植被指数来降低数据维度、 减少冗余信息[3, 4], 处理过程较为复杂。 而多光谱图像数据光谱分辨率较低, 特征参数计算相对简单, 且设备成本较低, 在农作物生长检测中日益得到重视[5, 6]。
可见光(RGB)和近红外(near-infrared, NIR)双目相机组合可实现R(Red)、 G(Green)、 B(Blue)和NIR四个波段的图像采集, 是一种经济的多光谱图像获取方式[7]。 但是采用双目相机, 两幅图像中对象空间位置不一致影响了作物NDVI图像的准确提取, 因而RGB和NIR图像的准确匹配至关重要[8]。
在图像匹配方面, 因传统的角点检测算法不能很好的处理不同尺度的问题[9], 提出了SURF(speeded-up robust features), SIFT(scale-invariant feature transform)和ORB(oriented brief)等算法。 一方面, 这些算法最初是基于RGB图像而提出的, 在RGB和NIR多光谱图像匹配中的应用效果需要讨论; 另一方面, 针对作物对象特征算法的适应性需要比较不同算法的计算效率, 计算效果来确定适合于选定作物的匹配方法。
因此, 本文以玉米植株为对象, 拟通过比较选取适合的RGB与NIR图像匹配算法, 实现两幅图像空间位置配准的基础上, 分割RGB和NIR图像中玉米植株对象, 校正环境光对图像采集的影响, 计算NDVI植被指数, 并建立不同视角的作物NDVI植被指数分布模型, 为作物营养分布监测提供技术支持。
为了采集玉米植株的图像信息, 搭建相机信息获取平台 包括: 相机系统、 相机支架、 待测植株和PC机, 通过USB数据延长线将相机和PC机相连。 其中, 相机系统利用可见光相机与红外相机组合方式, NIR图像中心波长位于830 nm, 拍摄RGB图像和NIR图像分辨率均为640× 480像素。
对玉米植株对象分别采用同步快门触发拍摄, 保证拍摄的一致性。
实验于2018年11月21日, 12月12日和12月19日在北京农业信息技术研究中心温室进行, 玉米分别处于苗期, 拔节期和大喇叭口期, 共计51株植株。 温室平均温度为27 ℃, 湿度为16%, 天气状况为晴天。 采集图像时相机距离地面的高度为1 620 mm。 设定90° , 54° 和35° 获取不同视角的作物图像。 系统结构与拍摄角度如图1所示。
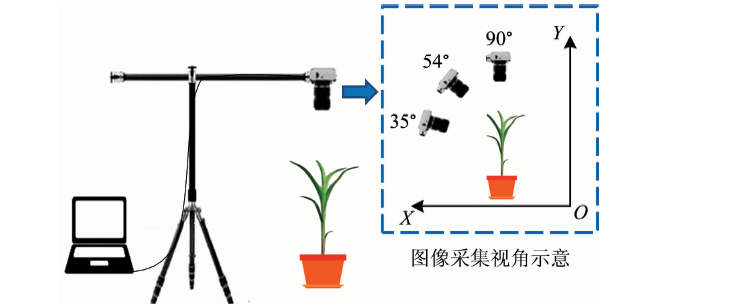 | 图1 图像采集系统与拍摄角度示意图Fig.1 Image acquisition system |
本研究图像总体处理流程如图2所示, 主要包括图像预处理、 图像匹配、 图像分割、 图像校正和植被指数图像生成。 首先, 对获取的RGB和NIR图像预处理, 经高斯滤波后, 利用拉普拉斯算子增强图像, 提高图像的对比度。 其次, 匹配预处理后的图像。 再者, 匹配对齐后, 采用超绿算法(extra green, ExG)分离RGB图像中作物和背景, 并基于最大类间方差算法(OTSU)分割图像得到掩模, 从而实现RGB和NIR图像的分割。 然后, 利用4灰度级标准板对校正图像光谱反射率, 消减光照的影响。 最后提取R, G, B, NIR分量计算NDVI指数, 形成作物植被指数的空间分布图。
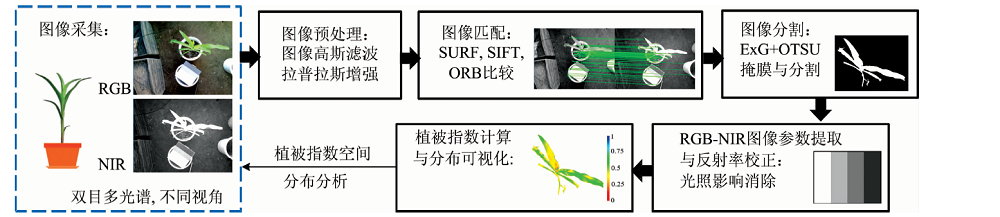 | 图2 图像总体处理流程图Fig.2 Flow chart of image processing |
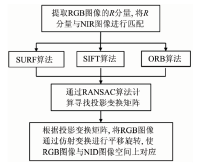
RGB和NIR图像匹配是生成作物对象NDVI图像的关键。 为了明确适用于复杂作物对象的RGB和NIR图像匹配算法, 对比分析了SURF算法, SIFT算法和ORB算法。 匹配时先将NIR图像作为标准图像, RGB图像作为待配准图像, 图像匹配算法过程如图3所示。
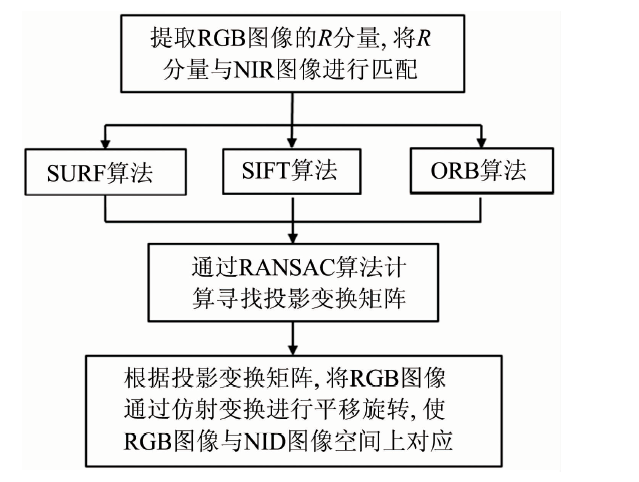 | 图3 图像匹配算法框图Fig.3 Principle diagram of image matching algorithm |
① SURF匹配算法
SURF算法采用积分图像和盒子滤波器, 使用近似的Hessian矩阵行列式来表示图像中某一点I(x, y)处的斑点响应值, Hessian矩阵行列式H(x, y, σ )定义为
其中Lxx(x, y, σ )为I(x, y)图像函数与高斯函数二阶微分
② SIFT匹配算法
SIFT算法与SURF算法在尺度空间的构造上存在差异, SIFT算法通过相邻的两层图像金字塔相减得到DoG(difference of guassian)图像, 然后在DoG图像上进行斑点和边缘检测工作[10]。
③ ORB匹配算法
ORB算法采用FAST算法来检测特征点, 构建N层金字塔, 利用Harris响应函数计算角点响应值, 然后对n个特征点进行排序, 基于质心计算出每个特征的主方向。 其中, 质心计算公式为
式中M00=
图像匹配性能的评价以匹配时间(Time)、 峰值信噪比(peak signal to noise ratio, PSNR)、 信息熵(mutual information, MI)和结构相似性指数(structural similarity index, SSIM)作为指标。 其中, 匹配时间(Time)用来评价两幅图像匹配的快慢程度和效率。
(1)PSNR用于评价两幅图像重合匹配的程度, 定义为
其中Cmax为图像的最大采样数, 所用的图像均为灰度图像, 所以Cmax=28-1=255, Cmse是标准图像和校准变换后的图像I'n(i, j)的均方误差, m和n分别为图像的宽度和高度。
(2)MI主要测量两个图像之间的依赖性和相似性, 是衡量标准图像和匹配图像之间的质量指标。 定义为
其中PX(X)和PR(r)分别表示标准图像和匹配图像的边缘直方图, PX, R(x, r)表示标准图像和匹配图像的联合组织图。
(3)SSIM是基于视觉系统对于敏感性结构的缺失和失真而提出的一种图像评估的方法, 该指数主要由三部分组成: 相关性缺失, 亮度失真和对比度失真, 定义为
对标准图像与匹配图像, SSIM表示二者结构相似度, r分别表示滑动窗口中二者的图像块, σ xr表示它们的协方差, σ x和σ r为它们的标准偏差[12]。
图像配准后分割作物对象图像, 主要过程如下:
① 利用ExG算法区分图像中作物和背景。
式中, G为RGB图像绿色分量, R为RGB图像红色分量, B为RGB图像蓝色分量。
② 采用OTSU算法计算出图像的分割阈值, 得到黑白图像。
③ 消除图像中的噪声点。 采用腐蚀形态学处理后, 计算图像中最大连通域, 确定为玉米作物对象的掩模黑白图像。
④ 基于掩模图像提取RGB和NIR图像中的作物对象。
为了消减光照对颜色的影响, 首先利用4灰度级标准板对多光谱图像灰度值进行校准, 其中各灰度级反射率分别为99%, 50%, 25%, 10%。 提取图像中4灰度级标准板每一像素点处R, G, B和NIR分量并进行归一化, 拟合各灰度板图像灰度值与标准反射率, 建立一元线性回归方程。 则可以实现作物光谱反射率校准。 其次利用式(8)计算NDVI值。
其中Rnir为近红外波段的反射率, Rred为红光波段的反射率。 NDVI取值范围为0~1之间, 绘制其伪彩色图得到其空间分布图。
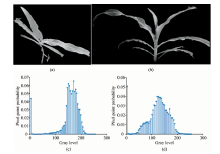
采集RGB和NIR图像并进行预处理后的样例如图4所示。 对采样的51株玉米样本分别应用SURF、 SIFT和ORB算法进行匹配, 以匹配时间(Time)、 峰值信噪比(PSNR)、 互信息熵(MI)和结构相似性(SSIM)评价匹配效果, 结果分别如图5(a)— (d)所示。 4幅图像中应用ORB算法的4和31号样本取值都为0, 说明ORB算法图像匹配失败, 因此去除了ORB方法的4和31号样本。 分析原因是由于4和31号样本背景过于复杂且图像中有较多的过曝点, 导致特征点匹配出现错误。
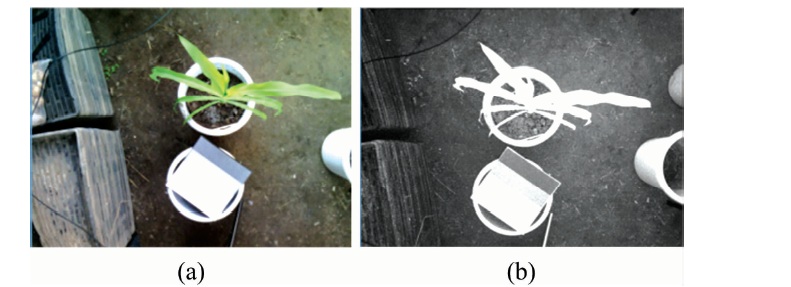 | 图4 图像采集及预处理后结果图像 (a): RGB图像; (b): NIR图像Fig.4 Image acquisition and preprocessing result (a): RGB image; (b): NIR image |
 | 图5 图像匹配性能评价结果 (a): 计算时间比较结果; (b): 峰值信噪比PSNR比较结果; (c): 互信息熵MI比较结果; (d): 结构相似性SSIM比较结果Fig.5 Image matching performance (a): Computational time comparison; (b): Peak signal-to-noise ratio (PSNR) comparison; (c): Mutual information entropy (MI) comparison; (d): Structural similarity (SSIM) comparison |
具体的, SURF, SIFT和ORB算法的评价指标统计如表1所示。 结合图5和表1分析可知:
① 时间上: SIFT(1.865 s)> SURF(1.412 s)> ORB(1.121 s), 这是因为SURF算法采用积分图像和盒子滤波器方法近似提取图像中的特征点, 相比于SIFT算法采用拉普拉斯算子通过相邻的两层图像金字塔相减得到DoG图像要快;
② 准确性上: 根据PSNR, MI, SSIM可知PSNR指标SURF(12.673)> SIFT(12.461)> ORB(11.294), MI指标SURF(1.091)=SIFT(1.091)> ORB(0.836), SSIM指标SURF(14.292)> SIFT (14.133)> ORB(11.591), 所以SURF算法和SIFT算法准确性相近, 高于ORB算法。
③ 稳定性上: SURF算法PSNR均方差为1.814, MI均方差为0.263, SSIM均方差为1.953; SIFT算法PSNR均方差为1.957, MI均方差为0.312, SSIM均方差为2.697; ORB算法PSNR均方差为3.324, MI均方差为0.374, SSIM均方差为3.659。 对比可知SURF算法的稳定性高于其他。
| 表1 匹配评价指标统计结果 Table 1 Statistics result on matching evaluation index |
综上所述, 选择SURF算法作为玉米植株对象RGB和NIR图像匹配的最优算法。
基于SURF算法进行玉米植株RGB-NIR图像匹配。 SURF搜索的图像特征点并利用距离阈值去除误匹配点后的示例图像如图6(a)。 进而采用RANSAC算法计算并寻找投影变换矩阵, 并将投影变换矩阵通过仿射变换对RGB图像进行平移、 旋转, 使RGB和NIR图像像素坐标一致, 结果如图6(b)所示。 平移变换后的RGB图像大小为640× 480, 如图6(c)所示黑色边缘是平移旋转产生的偏差。
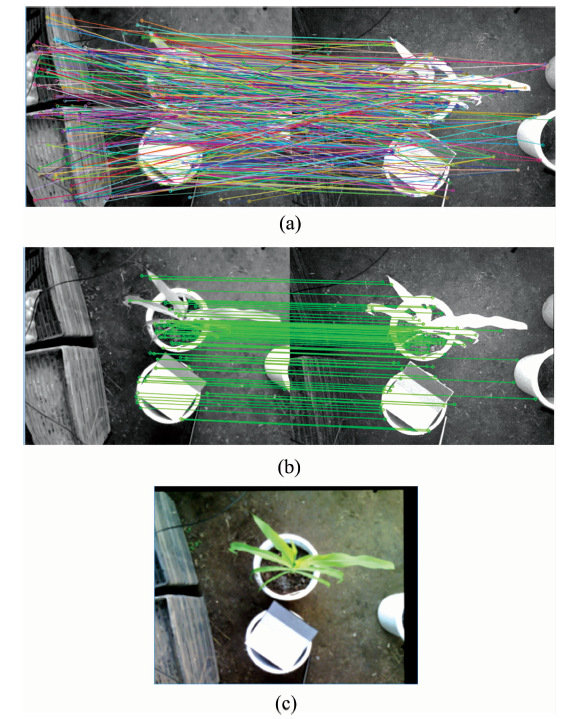 | 图6 图像匹配过程与结果 (a): SURF算法匹配特征点示意图; (b): RANSAC算法处理后的匹配点; (c): RGB图像的平移变换Fig.6 Image matching process (a): Feature point diagram of SURF matching algorithm; (b): Matching point after processing of RANSAC algorithm; (c): Translational transformation of RGB images |
基于超绿算法(ExG)和最大类间方差算法(OTSU)进行作物目标图像分割, 经形态学去噪后得到玉米作物对象的掩模黑白二值图像如图7(a)。 根据掩模分割RGB和NIR图像中玉米植株结果如图7(b)和(c)所示。 计算图中R, G, B和NIR图像灰度均值分别为148, 205, 105, 249, 这符合典型绿色植物的光谱反射特性, 即作物在绿色波段(450~600 nm)有小反射峰, 红光600~680 nm波段因叶绿素的较强的吸收呈反射谷, 在近红外680~1 000 nm范围存在强反射, 体现为作物叶片图像波段的灰度值呈GrayR< GrayG< GrayNIR。
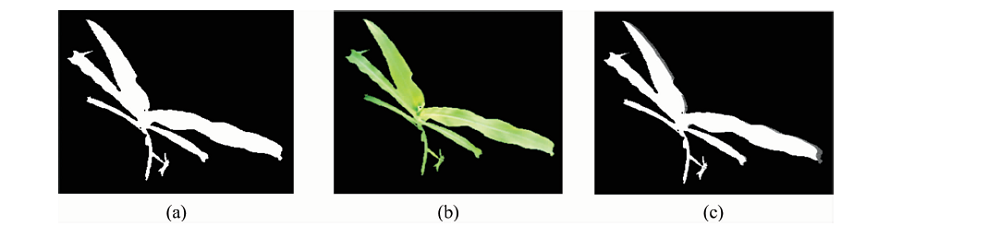 | 图7 作物图像分割结果 (a): 掩模图像; (b): RGB图像分割结果; (c): NIR图像分割结果Fig.7 Segmentation results of crop image (a): Masked image; (b): Segmented RGB image; (c) Segmented NIR image |
研究拍摄了90° , 54° 和35° 三个视角的RGB图像, 经过匹配和分割后分别如图8(a), (b)和(c)所示。 观察可知90° 时主要为玉米植株冠层叶片图像; 54° 和35° 既包含叶片又包含叶鞘, 其中35° 图像中对玉米植株叶鞘与叶位情况显示清晰; 而54° 视角下作物的冠层叶片与茎秆形态畸变。 因此在玉米植株生长监测中, 分别选取90° 和35° 图像分析冠层和植株体对象。
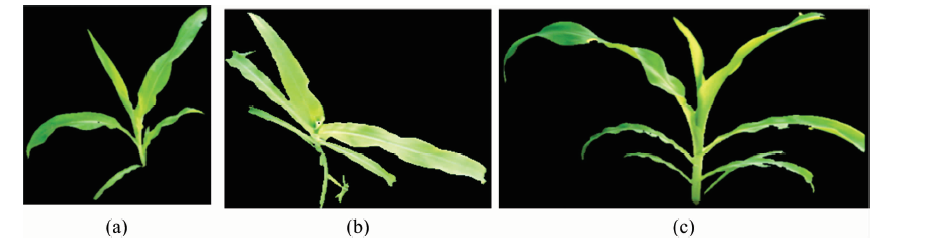 | 图8 不同视角作物植株RGB图像 (a): 90° 视角植株图像; (b): 54° 视角植株图像; (c): 35° 视角植株图像Fig.8 Segmentation results of different RGB images (a): Plant image at 90° ; (b): Plant image at 54° ; (c): Plant image at 35° |
为了评估RGB-NIR图像中环境光的影响, 研究基于HSI(hue-saturation-intensity)颜色模型提取了RGB图像中的I分量。 90° 和35° RGB图像的I分量分别如图9(a)和(b)所示。 绘制I分量的灰度直方图如图9(c)和(d), 90° 视角时I分量的灰度直方图像素点主要集中在灰度值130~200之间, 说明叶面的反射光较强; 35° 视角I分量的灰度直方图像素点分布在100~180之间, 且分布较为分散, 说明其反射光较弱且以散射光为主, 从而使得图像整体亮度偏低。 通过对比得出, 90° 的RGB图像易产生曝光噪声, 而倾斜测量反射光较弱, RGB成像效果较好。
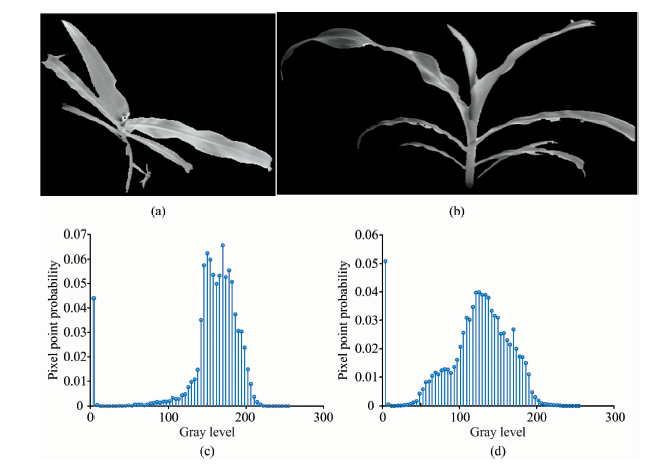 | 图9 作物I分量图像及灰度直方图 (a): 90° 视角下作物的I分量图像; (b): 35° 视角下作物的I分量图像; (c): 90° 视角I分量灰度直方图; (d): 35° 视角I分量灰度直方图Fig.9 Gray histogram ofcrop I component image (a): I-component image of crop at 90° ; (b): I-component image of crop at 35° ; (c): Gray-level histogram of I at 90° ; (d): Gray-level histogram of I at 35° |
光照的影响会导致同一植株上因叶绿素吸收而导致光谱响应无法在不同视角图像中准确反映。 因而研究开展反射率校正以消除光照差异的影响。 提取RGB和NIR图像中4灰度级标准板的R, G, B, NIR分量与反射率拟合建立线性校正公式如表2所示, 相关系数高于0.74。
| 表2 反射率拟合校正公式 Table 2 Calibration formula based on reflectivity fitting |
校准后, 计算配准图像中每个像素点的NDVI值, 从而绘制玉米作物NDVI空间分布图, 结果分别如图10(a)和(b)所示。 90° 视角图中清楚展现了冠层的NDVI分布情况, 叶尖部NDVI取值范围为[0.5, 0.7], 叶根部NDVI值范围为在[0.1, 0.25]。 35° 图中NDVI随植株叶位变化有明显的分层现象, 上层叶片NDVI值高于下层叶片。 同时, 由于叶片反射光90° 视角比35° 视角强度大, 使90° 视角的NDVI要高于35° 视角。 综合两幅图展现了作物叶片和叶鞘NDVI值分布情况, 叶片是进行光合作用的主要器官, 叶绿素含量和光合机能显著高于叶鞘, 所以图10(a)中叶片NDVI值高于图10(b)中叶鞘部位。 因此NDVI分布图可以用于监测作物营养状态和分布情况。
 | 图10 不同视角NDVI植被指数空间分布图 (a): 90° NDVI空间分布图; (b): 35° NDVI空间分布图Fig.10 Spatial distribution map of NDVI (a): NDVI spatial distribution at 90° ; (b): NDVI spatial distribution at 35° |
与此同时, 由顶层叶片图10(a), 尽管进行了灰度反射率校正, 但是由于叶片形态畸变导致同一叶片上NDVI均一性较差, 未来除反射率校正之外, 还应该开展叶片平整度校正的方法研究, 以提高作物光谱学植被指数可视化分析的精度。
利用可见光相机和红外相机结合方式获取了作物多视角RGB和NIR图像, 比较了多种图像匹配算法, 开展了基于ExG和OTSU的图像分割, 提取了RGB和NIR波段特征参数, 在反射率校正的基础上计算了NDVI并绘制了空间分布图。 主要结论如下:
(1) 对比SURF, SIFT, ORB三种算法的匹配性能, 结果显示: 在时间上SIFT(1.865 s)> SURF(1.412 s)> ORB(1.121 s), 准确性上SIFT≈ SURF> ORB, 稳定性方面SURF> SIFT> ORB。 综合选用SURF算法作为RGB和NIR图像的匹配算法。
(2) 提取R, G, B和NIR图像灰度均值存在GrayR< GrayG< GrayNIR关系, 符合典型绿色植被光谱特征。 评估了RGB-NIR图像中环境光的影响, 并利用4灰度级标准板进行了反射率校正, R, G, B, NIR分量校正公式R2分别为0.78, 0.76, 0.74, 0.77。
(3) 定性的分析90° 和35° 视角中叶片和叶鞘NDVI分布图显示上层叶片NDVI值高于下层叶片, 叶片NDVI值高于叶鞘。 说明NDVI分布图可以用于监测作物营养状态和分布情况。
尽管如此, 未来还需要继续开展叶片平整度校正的方法研究, 以提高作物光谱学植被指数可视化分析的精度。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|