








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于Metop-B/GOME-2的TG-2/MAI可见光通道交叉定标
[郭俊杰1, 2, 3  , 姚志刚
, 姚志刚2, 3, 4, * , 韩志刚2, 3 , 赵增亮2, 3 , 严卫1 ]
, 姚志刚, 韩志刚|
|


作者简介: 郭俊杰, 1994年生, 国防科技大学气象海洋学院硕士研究生 e-mail: 1083173651@qq.com
2016年9月15日发射的TG-2空间实验室上搭载的MAI是我国首个在轨运行的多角度偏振成像仪, 主要用于获取云和气溶胶等大气环境信息。 星载遥感仪器的定标是观测资料定量应用的关键前提且贯穿仪器的整个寿命期。 MAI发射前已经进行了实验室定标, 且精度较高。 为了监测MAI发射后的在轨运行情况, 针对其未配置在轨定标装置的问题, 利用Metop-B/GOME-2可见光波段的高光谱分辨率和较高探测精度的优势, 提出了基于GOME-2对MAI 565, 670以及763 nm通道进行在轨监测及交叉定标的方法。 该方法首先通过时空匹配、 视线几何匹配等获取MAI与GOME-2相近时刻、 相近视线几何条件下的同目标观测数据, 再将GOME-2反射率按照MAI可见光通道光谱响应函数进行卷积, 得到各通道的参考反射率, 与MAI反射率进行对比分析, 从而实现对MAI的定标。 利用不同反照率特性目标的匹配观测数据, 该方法能够实现仪器的高、 中、 低端观测的全覆盖定标。 定标过程主要包括: (1)对2016年12月到2017年2月期间TG-2和Metop-B的运行轨道进行预报, 获取二者交叉观测的整轨数据; 设置观测时间差为900 s, 初步匹配得到8组MAI与GOME-2交叉观测样例, 包含2 455组匹配像元; (2)对匹配像元空间位置进行检验, 保留单个GOME-2像元覆盖的MAI像元数超过338的交叉样本, 以确保单个GOME-2像元尽可能被MAI观测充满; (3)给定GOME-2观测天顶角小于30°的限制条件, 同时设置视线几何检验条件为两仪器观测天顶角余弦的比值接近于1, 且相差不超过0.05, 并充分利用MAI的多角度观测优势, 对每一个MAI像元采用最多14个方向的视线几何进行匹配, 从而选择最优的视线匹配方向; (4)设置观测目标均匀性检验条件为一个GOME-2像元覆盖的全部MAI像元反射率的标准差和均值之比小于0.5, 对匹配像元进行检验, 得到469个匹配的GOME-2像元。 (5)将以上GOME-2像元对应的各个波长的反射率按照MAI可见光通道的光谱响应函数进行积分, 即可得到MAI各通道对应的GOME-2参考反射率。 (6)利用GOME-2像元空间分辨率显著大于MAI分辨率的特征, 对每个GOME-2像元覆盖的全部MAI像元反射率进行平均作为MAI反射率, 显著降低了定标结果对观测目标均匀性的依赖程度。 (7)将GOME-2参考反射率与MAI反射率进行回归分析, 得到定标系数, 实现对MAI的在轨交叉定标。 为了分析各匹配条件对定标结果的影响, 利用单一变量法对像元匹配过程中各检验条件阈值进行调整并开展了分析试验。 结果表明, 当进一步严格匹配筛选条件时, 定标结果不会产生显著变化。 基于该方法对MAI三个通道反射率和GOME-2参考反射率进行对比分析, 结果表明二者之间存在显著地线性关系, 且相关系数均优于0.97, 对比差异的均值分别为1.6%, 4.2%和2.3%, 标准差分别为3.1%, 4.1%和2.4%。 总体来看, 利用在轨交叉定标方法能够实现MAI可见光波段的在轨监测及定标, 为MAI数据的定量应用奠定了基础。
The MAI on TG-2 space laboratory, which was launched on 15 September 2016, is the first on-orbit Multi-angle Polarization Imager in China. The capability of MAI is mainly used to obtain macroscopic and microphysical features of clouds. On-orbit calibration of spaceborne remote sensing instruments is a key prerequisite for the quantitative application of observational data and extends throughout the life of the instrument. Laboratory calibration has been performed prior to MAI launch with high accuracy. In order to monitor the status of MAI after launched, aiming at the problem that MAI has no onboard calibration system, a method of on-orbit monitoring and inter-calibration of TG-2/MAI 565, 670 and 763 nm channels based on Metop-B/GOME-2 hyperspectral data has been presented. The method first obtains the data of same observation target at the similar time and near geometric condition of MAI and GOME-2 based on spatial, temporal and geometric collocation criterion. Then, the GOME-2 reflectance is convoluted with the spectral response function of the MAI visible channels to obtain the reference reflectivity of visible channels. Finally, compare the reference reflectivity with the MAI reflectivity to achieve the onboard calibration of MAI. The process of calibration mainly includes: (1) Forecasting the orbit of TG-2 and Metop-B from December 2016 to February 2017 to obtain the collocated observations between MAI and GOME-2. The temporal matching interval is set to 900 s, and 8 collocated samples of MAI and GOME-2 are obtained, including 2 455 matched pixels. (2) The spatial location of matched pixels is checked, and the cross samples with MAI pixels over 338 covered by a single GOME-2 pixel is reserved to ensure that a single GOME-2 pixel is filled as completly as possible by the MAI pixels. (3) The limit of GOME-2 observation zenith angle is set to 30°, and the geometry of the observation sight detection condition matching pixels is set to the ratio of cosine of the two instruments observed zenith angle is close to 1, and the difference is not more than 0.05, and takes full advantage of MAI multi-angle observation, which allows each MAI pixel with up to 14 viewing angles. Therefore, the optimal matching viewing angle could be chosen; (4) In the target uniformity checking, the condition of uniformity detection for matched pixels is set to the ratio of the reflectance of all MAI piexls coveraged by a GOME-2 piexl standard deviation and the average is less than 0.5. And 469 GOME-2 pixels are reserved. (5) The reflectance of each wavelength corresponding to the above GOME-2 pixels is convoluted with the spectral response function of the MAI visible channel to obtain the corresponding GOME-2 reference reflectance of each MAI channel. (6) Based on the large difference of the spatial resolution of GOME-2 and MAI pixel, the reflectance of all MAI pixels covered by each GOME-2 pixel is averaged and taken as MAI reflectivity, which significantly reduces the dependence of calibration results on target uniformity. (7) And the inter-calibration coefficients are derived by regression analysis of the GOME-2 reference reflectivity and the MAI reflectivity. Onboard inter-calibration of the MAI is achieved. To analyze the influence of matching and screening conditions on the calibration results, the simple variable method is used to adjust the threshold of each test condition in pixel matching and screening process. The results show that the calibration results do not change significantly when the matching and screening conditions are more stringent. The MAI reflectance and the GOME-2 reference reflectance are compared, and the results indicate that both reflectivities have a significant linear relationship with the correlation coefficients all better than 0.97. The mean values of their differences are 1.6%, 4.2% and 2.3%, and the standard deviations are 3.1%, 4.1% and 2.4% for the three channels, respectively. Therefore, on-orbit monitoring and vicarious calibration of the MAI visible bands can be achieved by the inter-calibration method, which lays the foundation for the quantitative application of MAI data.
MAI(Multi-Angle Polarization Imager)是我国的首个在轨运行的多角度偏振成像仪。 MAI不仅能够获取目标的偏振特性, 还能对同一目标实现多角度、 多通道观测, 最多可以在14个角度对同一目标进行观测, 对于获取全球云和气溶胶特征具有极其重要的意义。
星载遥感仪器的定标是观测资料定量应用的关键前提条件且贯穿仪器的整个寿命期。 整体而言, 现有定标方法可以分为三类: 发射前的定标(实验室定标、 外场定标)、 发射后的在轨星上定标以及替代定标(场地定标、 交叉定标)[1, 2]。 MAI在发射前已经完成了实验室绝对定标, 但实验室定标过程不能完全模拟卫星在轨运行环境, 且发射后仪器响应特征会随时间衰减, 从而可能导致仪器发射后的观测结果出现偏差[1]。 由于MAI无内置的星上定标装置, 故需要采用替代定标方法对其在轨运行状况进行监测和校正。
交叉定标是指将参考仪器和待定标仪器在同一时刻、 同一视角对同一目标观测得到的结果进行对比分析, 得到待定标仪器相对于参考仪器观测结果的偏差, 从而根据误差特性对待定标仪器实验室定标结果进行校正。 相对于场地定标, 交叉定标具有定标成本低、 对场地的依赖性弱、 可以实现多仪器、 多频次的定标等优势。 目前, 红外波段交叉定标技术已经相当成熟[3, 4], 并广泛应用于MODIS等探测器。 基于交叉定标的诸多优势, 同时为了分析和比较不同仪器可见光波段观测结果的一致性, 国内外一些专家学者开展了相关研究。 研究结果表明, 可见光波段的交叉定标能够针对各种场景下的观测实现反射率的高端和低端全覆盖, 且定标精度相对较高[5, 6, 7, 8, 9]。 Koelemeijer等[5]利用搭载于同一卫星ERS-2的GOME对ATSR-2的555和659 nm通道进行交叉定标, 结果表明ATSR-2 555和659 nm通道反射率相对GOME参考反射率偏差分别为4%和2.2%; Lallart等[6, 7]对POLDER-2/ADEOS-Ⅱ , MISR/Terra和MODIS/Terra可见光通道进行了对比分析, 结果表明, POLDER-2与MODIS的差异在443和670 nm通道为1%以内, 565 nm通道为5%以内; POLDER-2和MISR在443 nm通道差异为0.7%、 在565和670 nm通道差异为8%以内; Meirink等[8]基于MODIS对SEVIRI进行在轨监测及交叉定标, 结果表明600和800 nm通道两个仪器偏差分别为8%和6%; Yu等[9]利用S-NPP/VIIRS对Himawari-8/AHI可见光波段反射率进行交叉定标, 结果表明在高反射率区域定标误差在5%以内。
本文针对MAI无在轨定标装置的问题, 结合MAI多角度观测及高空间分辨率的特点, 提出了基于GOME-2 L1B高光谱数据对MAI 565, 670和763 nm通道进行在轨监测以及交叉定标的方法。 该方法在视线几何检验中, 充分利用了MAI的多角度观测优势, 对每一个MAI像元采用14个方向的观测几何进行匹配, 从而找到最优的视线匹配方向; 其次, 利用GOME-2和MAI像元空间分辨率存在较大差异的特征, 对MAI像元反射率进行了平均处理, 显著降低了定标结果对观测目标均匀性的依赖程度。
MAI是由北京应用气象研究所和中国科学院上海技术物理研究所联合论证研制的一种可见光-近红外波段的多角度偏振成像仪, 可用于开展全球辐射收支、 云宏观及微物理特性、 气溶胶、 云顶气压以及水汽等的研究。 和POLDER相比, MAI搭载的平台TG-2空间实验室轨道更低, 仪器的分辨率更高[5]。 仪器基本参数见表1。
| 表1 MAI基本参数 Table 1 Basic parameters of the MAI |
MAI主要由CCD矩阵探测器、 滤光片组合转轮以及宽视场光学系统组成。 观测的有效像元数为256× 256, 像元尺寸为26 μ m× 26 μ m, 沿轨和跨轨方向视场均为87.6° 。 组合转轮中包含13个滤光片, 共计6个观测通道。 其中, 3个偏振通道分别为565, 670和865 nm; 3个非偏振通道分别为763, 765以及910 nm, 每个偏振通道对应3个通光轴取向分别为-60° , 0° 和60° 的滤光片, 剩余一个为不透明滤光片, 主要用于暗电流监测。 MAI一个成像周期8.625 s, 滤光片组合转轮转动四圈, 只在第一圈进行采样观测。 当卫星经过某一目标时, 从目标进入探测器视场到最终消失, 最多可实现14个不同方向的观测。 多角度偏振成像仪的通道设置见表2, 各通道光谱响应函数见图1。
| 表2 多角度偏振成像仪通道设置 Table 2 Characteristics of the spectral band of MAI |
TG-2发射前, 根据实验室辐射绝对定标(积分球作为完全非偏振光源作正入射测试)确立了计数值与积分球辐射率的关系, 实现了MAI实验室定标。 此外, 2015年秋末冬初, 在成山头以东海域开展了4架次共计17 h的MAI机载观测试验, 分别获取了晴空和云场景下的航空飞行数据以及相应的地面配合试验数据, 对MAI的各项性能指标进行了验证分析[10]。 总体来讲, MAI发射前各项指标良好, 数据达到较高精度。
 | 图1 MAI光谱响应函数和GOME-2反射率Fig.1 Spectral response functions of MAI and GOME-2 reflectivity |
2012年9月17日发射的Metop-B上搭载的GOME-2(The Global Ozone Monitoring Experiment)是欧洲气象卫星开发组织(EUMETSAT)基于第一代全球臭氧监测仪GOME发展起来的新一代用于全球臭氧监测试验的紫外-可见光中分辨率天底扫描光谱仪, 它包含4个光谱通道, 波长范围为240~790 nm, 光谱分辨率为0.2~0.51 nm, 通道设置见表3[11, 14]。
| 表3 GOME-2通道设置 Table 3 Characteristics of the spectral band of GOME-2 |
较GOME而言, GOME-2在空间分辨率和数据校正技术方面有了极大的提高。 GOME-2的L1B产品为对地观测辐射率, 经过了暗电流校正、 像元增益校正、 杂散光校正以及光谱校正等工作[12]; 同时, EUMETSAT对GOME-2数据开展了大量的校验工作[13], 数据精度达到了较高标准。 王后茂等[14]将GOME-2作为参考仪器, 对FY-3A/TOU进行了交叉定标, 结果表明, 二者辐射率具有显著地线性关系, 各个通道的相关系数均达到0.96以上。
根据表2和表3给出的MAI和GOME-2通道设置, 结合MAI的光谱响应函数以及GOME-2反射率随波长的分布(如图1)可知, GOME-2的通道3和通道4能够完全覆盖MAI的565, 670以及763 nm通道。 因此, 可以将GOME-2作为参考仪器对MAI 565, 670以及763 nm通道进行交叉定标。
对MAI和GOME-2 2016年12月到2017年2月期间观测结果进行初步分析, 得到MAI与GOME-2交叉观测样例有8组, 其交叉时间以及经纬度坐标见表4。
| 表4 交叉定标样例 Table 4 Cases of inter-calibration |
交叉定标需要保证两个仪器在同一时刻同一视线几何条件下观测相同的目标, 因此两个仪器的数据需要满足多项指标[15, 16, 17], 具体流程如图2所示。
 | 图2 MAI与GOME-2交叉定标流程Fig.2 Flow chart of inter-calibration between MAI and GOME-2 |
(1)数据预处理
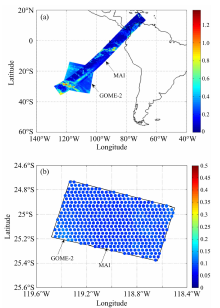
利用SGP4轨道预报软件预报TG-2和Metop-B的轨道交叉点[18], 根据交叉点信息获取MAI和GOME-2相应的整轨数据。 图3(a)给出了MAI和GOME-2一次交叉观测的反射率图。 为了确保两个仪器交叉观测时能够在相同天顶角下观测同一目标, 需要进一步对获取的整轨数据进行筛选, 只保留两个仪器对应像元时间差在900 s之内的数据, 初步得到匹配样本, 如表4。
(2)匹配像元空间位置检验
GOME-2像元大小为80 km× 40 km, MAI像元大小为3 km× 3 km, 故认为当中心坐标在GOME-2像元内的MAI像元数超过338个的交叉样本即为MAI完全填充样本。 对匹配像元空间位置进行检验, 保留MAI完全填充的交叉样本。 图3(b)给出了MAI和GOME-2像元空间匹配样例, 图中方框代表一个GOME-2像元, “ o” 代表一个MAI像元。
 | 图3 MAI与GOME-2交叉样例 (a): MAI与GOME-2交叉观测情况; (b): MAI像元与GOME-2像元空间匹配情况Fig.3 Inter-cross case between MAI and GOME-2 (a): Cross-observation of MAI and GOME-2; (b): Piexls of spatial position matching |
(3)匹配像元视线几何检验
在匹配像元空间位置检验的基础上, 为了尽可能减小BRDF对定标结果的影响, 给定GOME-2观测天顶角小于30° 的条件。 同时为了保证两个仪器观测视角相同, 进一步给定如下的匹配像元视线几何的检验条件
其中, θ M代表MAI观测天顶角, θ G代表GOME-2观测天顶角。
MAI最多可以在14个不同角度下观测同一目标。 因此对于匹配像元视线几何检验, 首先计算每个GOME-2像元所覆盖的全部MAI像元14个观测天顶角θ M对应的
(4)观测目标均匀性检验
为了尽可能减小观测目标均匀性对定标结果的影响, 对通过视线几何检验的匹配像元进行观测目标均匀性检验, 检验条件设置为
其中, σ 和Iave分别表示一个GOME-2像元所覆盖的全部MAI像元的反射率的标准差和平均值。 此外, 由于一个GOME-2像元对应约338个以上的MAI像元, 故可以近似认为目标均匀性可以代表环境均匀性。
(5)光谱转换
GOME-2高光谱数据按照下面卷积公式对MAI各通道光谱响应函数进行积分, 即可得到各通道的GOME-2参考反射率。
其中, RSIM是GOME-2按照MAI光谱响应函数积分以后的参考反射率, RG为GOME-2观测得到的反射率, f(λ )为MAI光谱响应函数。
(6)回归分析
对每个GOME-2像元内经像元视线几何检验的全部MAI反射率分别作平均作为MAI反射率。 利用GOME-2参考反射率和MAI反射率做线性回归, 从而得到回归方程。
基于上一部分介绍, 交叉定标方法的不确定性主要取决于定标过程中待定标仪器和参考仪器之间的观测时间差、 像元空间位置、 观测天顶角、 传感器视线几何、 观测目标均匀性以及光谱转换等因子。 其中, 本文给定的像元匹配条件使得MAI像元基本能够完全填充GOME-2像元, 因此, 像元空间位置匹配不会引入不确定性; 此外, 相对于MAI而言, GOME-2作为高光谱数据, 其能够完全覆盖MAI 565, 670以及763 nm通道, 故利用GOME-2数据进行卷积得到参考反射率对MAI定标认为是准确的。 因此, 这里主要对时间差异、 观测天顶角、 传感器视线几何以及观测目标均匀性对定标结果的影响加以分析。 图4— 图7给出了各个因子对定标结果的影响, 图中数字为对应条件下的样本数, 其中, 图4由于只针对低反射率样本分析, 故三个通道样本数目不一致, 图5— 图7均针对全部样本分析, 三个通道样本数目均一致。
观测时间匹配的影响主要体现在视场存在不稳定云层的情况下, 云层的生消以及移动等因素导致传感器不同时刻针对同一位置观测到的目标可能出现差异, 故匹配到时间差异小的样本点至关重要。 由于MAI和GOME-2的交叉匹配难度较大, 在现有观测资料中, 时间差异较小时, MAI和GOME-2匹配的场景较为单一, 多为反射率小于0.2的低反射率的场景。 因此, 对全部匹配样本而言, 时间差异对定标结果的影响主要考虑反射率小于0.2的样本。 保持其他匹配条件不变, 通过改变时间匹配条件进行分析, 得到图4所示结果。 图4给出了MAI低端反射率与GOME-2参考反射率的平均偏差随着时间匹配条件的变化情况。 该图表明, 在时间差900 s以内, 平均偏差随时间匹配条件变化的幅度很小, 当时间匹配条件从500 s增大到900 s过程中, 时间匹配条件引起的MAI反射率与GOME-2参考反射率的平均偏差的变化在0.5%之内。
 | 图4 Δ R随时间差异的变化Fig.4 Δ R as a function of time matching conditions |
进一步对像元时间差的分布情况进行分析, 表5给出了不同时间差范围对应的像元数目以及对应的各个范围内的MAI反射率与GOME-2参考反射率的平均偏差分布。 整体而言, 在不同时间差范围内, 平均偏差存在波动, 但除500≤ Δ T< 700范围以外, 平均偏差波动幅度较小, 且呈现出时间差越大平均偏差越大的趋势。 其中, 500≤ Δ T< 700范围内, 平均偏差相对波动较大可能与样本点少相关。
| 表5 不同时间匹配条件下的样本点及其对应的平均偏差的分布 Table 5 Distribution of pixels and the corresponding average deviation under different temporal matching conditions |
可见光通道交叉定标难以业务化的问题之一就在于对BRDF的处理方面[2]。 当观测天顶角过大时, BRDF会显著影响MAI辐射率与GOME-2参考辐射率的偏差。 因此, 保持其他条件不变, 将观测天顶角阈值分别设置为10° , 15° , 20° , 25° , 30° , 分析天顶角对定标结果的影响。 图5为平均偏差随观测天顶角的变化情况。 结果表明, 当观测天顶角在30° 以内变化时, 三个通道平均偏差随着天顶角的变化很小, 均在0.5%以内。
表6为各个通道不同天顶角范围内的样本点及其对应的平均偏差的分布情况, 在观测天顶角30° 范围内, 平均偏差的分布与观测天顶角的大小无关。
 | 图5 Δ R随观测天顶角阈值的变化Fig.5 Δ R as a function of viewing zenith angles |
| 表6 不同天顶角范围内的样本点及其对应的平均偏差的分布 Table 6 Distribution of pixels and the corresponding average deviation in different zenith angles |
在实际定标过程中, 严格的同瞳观测几乎难以实现。 故本文在观测天顶角限制的基础上给定了|cosθ M/cosθ G-1|< 0.05的匹配像元视线几何检验条件, 目的是使匹配到的样本尽可能接近同瞳观测。 图6给出了当其他匹配条件不变的情况下, MAI三个通道反射率与GOME-2参考反射率的平均偏差随着视线几何差异的变化情况。
 | 图6 Δ R随视线几何匹配条件的变化 (a): 565 nm; (b): 670 nm; (c): 763 nmFig.6 Δ R as a function of geometric matching conditions (a): 565 nm; (b): 670 nm; (c): 763 nm |
图6表明, 当视线几何匹配条件|cosθ M/cosθ G-1|在0.02~0.05范围内时, 三个通道MAI反射率与GOME-2参考反射率的平均偏差随着|cosθ M/cosθ G-1|的变化分别为0.2%, 0.1%, 0.1%; 当视线几何匹配条件设置为0.01, 即: 在|cosθ M/cosθ G-1|< 0.01时, 平均偏差显著偏大, 主要原因是: 该条件下匹配到的样本数目只占总样本数的6%左右, 所得结果的代表性不强。 就其设置为0.02~0.05而言, 视线几何匹配差异造成的平均偏差的变化不超过0.2%。 表7为各个通道不同视线几何条件下的样本点及其对应的平均偏差的分布情况, 该表能够清楚的反映出不同视线几何条件范围内样本的分布, 样本主要集中在0.015~0.3之间, 且当视线几何匹配条件较小时, 可能由于样本量小, 平均偏差相对偏高, 与图6结果一致。
| 表7 不同视线几何条件下的样本点及其对应的平均偏差的分布 Table 7 Distribution of pixels and the corresponding average deviation under different geometry of the observation sight detection condition |
对单个GOME-2像元覆盖的所有MAI像元反射率进行平均作为MAI反射率, 最大程度减小了交叉定标结果对目标均匀性的依赖性, 故本文中对均匀性检验条件设置较为宽松。 通过对给定的均匀性检验条件对定标结果影响进行分析, 给出均匀性条件引入的不确定性。 图7给出了MAI三个通道反射率与GOME-2参考反射率的偏差随着观测目标均匀性条件|σ /Iave|的变化情况。
如图7所示, 当观测目标均匀性检验条件|σ /Iave|≤ 0.5时, 三个通道MAI反射率与GOME-2参考反射率的平均偏差对均匀性检测条件|σ /Iave|的依赖性较弱。 在本文给定的观测目标均匀性检验条件下, 不同目标均匀性阈值下, 平均偏差的变化在0.7%以内。 表8为各个通道不同目标均匀性条件下的样本点及其对应的平均偏差的分布, 表明: 均匀性条件|σ /Iave|越大, 即: 目标的均匀性越差, 平均偏差越大。
 | 图7 Δ R随观测目标均匀性条件的变化 (a): 565 nm; (b): 670 nm; (c): 763 nmFig.7 Δ R as a function of the target uniformity condition (a): 565 nm; (b): 670 nm; (c): 763 nm |
| 表8 不同目标均匀性条件下的样本点及其对应的平均偏差的分布 Table 8 Distribution of pixels and the corresponding average deviation under different condition of uniformity detection |
上一节利用单一变量法对像元匹配过程中各检验条件阈值进行调整并开展了分析试验。 结果表明, 当进一步严格匹配筛选条件时, 定标结果不会产生显著变化。 利用前文给出的匹配方法, 得到了匹配像元如图8所示。 该图为GOME-2 565 nm波长处对应的反射率图, 图中黑圈为满足匹配条件的GOME-2像元。 由图可见, GOME-2与MAI匹配样本基本均匀, 匹配场景覆盖晴空海表、 晴空陆地以及云等, 基本实现了反射率的低中高端全覆盖。
利用前文所述的交叉定标方法, 针对表4中的交叉观测样例, 对MAI反射率和GOME-2参考反射率进行了比较分析。 图9给出了MAI反射率与GOME-2参考反射率的关系。 图10给出了MAI反射率与GOME-2参考反射率的偏差随GOME-2参考反射率的变化情况。 由图可知, 匹配样本的反射率覆盖了低端和高端, 可用于评估较大响应范围内两个仪器观测结果之间的一致性。
 | 图8 匹配样本场景示意图Fig.8 Matching sample scenario diagram |
 | 图9 MAI反射率与GOME-2参考反射率关系 (a): 565 nm; (b): 670 nm; (c): 763 nmFig.9 Relationship between MAI and GOME-2 (a): 565 nm; (b): 670 nm; (c): 763 nm |
 | 图10 Δ R随GOME-2参考反射率的变化 (a): 565 nm; (b): 670 nm; (c): 763 nmFig.10 Δ R as a function of the GOME-2 reflectivity (a): 565 nm; (b): 670 nm; (c): 763 nm |
图9和图10表明: 565, 670以及763 nm通道MAI反射率和GOME-2参考反射率呈现出显著的线性关系, 二者的相关系数分别达到了0.976, 0.982和0.984。 565 nm通道MAI反射率与GOME-2参考反射率的平均偏差为1.6%, 二者差值的标准差为3.1%; 670 nm通道对比结果分别为4.2%, 4.1%; 763 nm通道对比结果分别为2.3%, 2.4%。 结果表明, 由于MAI升空之后, 外部运行环境发生显著的改变, 使得MAI实验室定标系数发生了不同程度的偏移, 其中, 以670 nm通道最为显著, 763 nm次之, 565 nm几乎没有出现偏移。 表9给出了MAI反射率与GOME-2参考反射率的线性回归结果以及回归系数的不确定性。 利用回归方程, 可以对MAI观测结果的系统偏移进行校正。
交叉定标的误差来源主要有: (1) 定标方法本身可能存在不确定性, 主要是由于样本匹配过程中产生的, 本文第三部分对交叉定标方法的不确定性进行了分析, 结果在1%以内; (2) 交叉定标方法本身存在一个误差传递的过程, 即: 定标的精度与待定标仪器和参考仪器本身精度相关; 尽管GOME-2数据精度很高, 但仪器本身仍然存在噪声, 使得GOME-2数据存在2%的不确定性[11, 12, 13, 19, 20]; (3)两个载荷平台轨道不同所致匹配像元太阳方位角差异引起的观测差异。
| 表9 MAI反射率与GOME-2参考反射率线性回归结果 Table 9 Linear regression results of MAI and GOME-2 |
为了解决TG-2/MAI无内置在轨定标系统的问题, 本文结合TG-2/MAI的多角度观测优势, 同时利用GOME-2像元大小与MAI差异较大的特征, 提出了基于Metop-B/GOME-2高光谱数据对TG-2/MAI 565, 670以及763 nm通道进行在轨监测及交叉定标的方法。 为了考虑交叉定标方法本身的不确定性, 基于单一变量法对各个因子的影响进行了分析, 结果表明, 时间匹配条件、 天顶角范围、 匹配像元视线几何检测条件和均匀性检测条件分别设置为900 s, 30° , 0.05以及0.5时, 交叉定标方法的不确定性在1%以内。
将MAI观测结果与卷积得到的GOME-2参考值进行比较, 结果表明: 在2016年12月至2017年2月期间, MAI反射率与GOME-2参考反射率呈现显著的线性关系, 且三个通道MAI反射率与GOME-2参考反射率的相关系数均在0.97以上。 三个通道MAI反射率与GOME-2参考反射率的偏差分别为1.6%, 4.2%, 2.3%, 对应的标准差均在5%以内。 对比差异产生的主要原因是MAI仪器通道存在的偏差以及两仪器自身的噪音。 整体而言, 这里提出的基于GOME-2高光谱数据的MAI可见光通道交叉定标方法, 能够得到与国际上针对其他可见光遥感仪器相当精度的定标结果[21, 22]。 该方法的提出有效解决了MAI后续在轨监测及替代定标的问题, 同时也为后期MAI数据在云与气溶胶方面的研究推广应用奠定了基础。
致谢: 中国科学院空间应用与技术中心提供数据获取支持。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|