

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
CNN在煤矿突水水源LIF光谱图像识别的应用
[周孟然1  , 来文豪
, 来文豪1, * , 王亚1, 2 , 胡锋1 , 李大同1 , 王锐1 ]
, 来文豪, 王亚|
|


作者简介: 周孟然, 1965年生, 安徽理工大学电气与信息工程学院教授 e-mail: mrzhou8521@163.com
煤矿突水类型的快速识别在矿井安全生产中意义重大, 煤矿突水激光诱导荧光(LIF)光谱的识别方法, 需要对光谱曲线进行预处理和特征提取, 其过程较复杂, 对此, 提出了一种卷积神经网络(CNN)快速识别矿井突水类别的方法。 根据煤矿矿井水层的分布特点和最常见煤矿突水类型, 选取三种原始水样以及由原始水样混合的两种混合水为实验材料, 利用LIF技术快速获取五种水样的200组荧光光谱曲线图, 灰度化后输入CNN算法, 其中150组光谱曲线图用于CNN的训练, 剩余50组用于训练好的模型测试。 模型测试中, CNN算法对实验水样光谱曲线图的识别率为100%, 实验结果表明, CNN算法不仅能省去煤矿突水光谱图像识别中的数据处理和特征提取工作, 而且还能快速有效的识别矿井突水类型。
Rapid identification of mine water inrush has great significance for mine safety production. The identification method of laser induced fluorescence(LIF) in mine water inrush requires to pretreat and characterizing the spectral curve is complicated. Therefore, a method to quickly identify the type of mine water inrush by using the convolutional neural network(CNN) was proposed. According to the coal mine water distribution characteristics and the most common type of water inrush, we selected three kinds of raw water samples and two kinds of mixed water mixed by the original water as experimental material, in the experiment, we used LIF technology to quickly obtain 200 sets of fluorescence spectrum curves of 5 kinds of water samples. After gray degree transformation, the fluorescence spectrum curves inputed into CNN algorithm,150 groups of spectrum as the training set while the rest 50 groups of spectrum as the test set. In the model test, CNN’s recognition rate was 100%. The experimental results showed that the CNN algorithm can not only save the data processing and feature extraction in the image of recognition of mine water inrush, but also quickly and effectively identify the type of mine water inrush.
煤矿在开采过程中, 大量地下水涌入矿山井巷的现象, 即为矿井“ 突水” 。 矿井突水严重威胁煤矿生产安全, 当矿井发生突水后, 如果能及时的判断出突水类型及突水来源, 这样可以对突水采取最为有效的治理方法, 使损失降为最低。 目前, 在煤矿矿井突水类型识别中, 大多使用化学方法分析矿井水源里金属离子的种类和浓度, 进而判别突水类型[1, 2, 3], 但是此类方法用时很长, 无法快速识别突水类型。 LIF技术能快速的获取突水水源的荧光光谱图, LIF光谱图也能较好表达不同水源的特异性, 但传统模式识别算法在LIF光谱图像识别中, 需要花费大量的时间与精力在光谱图像的特征提取上[4], 因而, 文中提出一种新的LIF光谱识别方法, 将CNN算法应用于煤矿水源光谱图像的识别。
深度学习是机器学习研究中的一个新领域, CNN作为深度学习领域最重要的监督学习算法, 其特征学习能力具有分层特性[5], 一张三维图片可以直接作为网络的输入, 而不用人工进行预先特征提取。 相比于人工设计的特征, 经过CNN学习而得到的特征具有更强的映射能力和泛化能力[6], CNN的网络深度越深越有利于分类精度[7, 8]。
CNN主要应用领域有行为识别[9]、 行人检测[10]、 人体姿势识别[11]、 自然语言处理[12]、 语音识别[13]等, 还未见有文献将CNN应用于光谱曲线的识别, 文中将CNN算法应用于煤矿水源的荧光光谱曲线图识别, 并与PCA-BP分类算法做了详细的对比。
卷积神经网络(CNN)的学习过程和BP神经网络算法很相似, 都包含参数的前向传递和误差的反向传播。 最大区别在于卷积神经网络的输入可以是一张三维图片, 特征提取和分类学习在网络训练中同时进行, 并通过权值共享和局部连接降低网络训练时的参数。 CNN主要由输入层、 卷积层、 池化层和全连接层构成。 大多情况下, CNN中有多层卷积层和池化层。
卷积层C为特征提取层, 每个神经元的输入与前一层的局部感受视野相连, 提取该局部的特征, 并通过relu函数作为卷积层的激活函数, 提高网络的非线性映射能力。 一般情况, 每个卷积层后面跟着一个实现局部平均和子抽样的计算层P(池化层), 可降低特征映射的分辨率, 池化层具有使特征映射的输出对平移和其他形式的变形的敏感度下降的作用[14], 全连接层(fully connected layers, FC)在整个卷积神经网络中起到“ 分类器” 的作用。
传统模式识别分类算法在分类前首要解决的问题就是特征提取, 就矿井水源光谱识别而言, 首先需要对光谱图进行平滑、 去噪等处理, 接着降维、 特征选取, 最后使用分类器分类, 分类器的分类精度依赖于网络输入的特征值合理与否, 而合理的特征提取又依赖个人丰富的经验或大量的实验。 相比较于传统模式识别算法, CNN则不需要事先进行特征提取, 为人工省去麻烦的特征提取工作。 传统模式识别算法与CNN分类算法对煤矿突水光谱图的分类过程简图如图1所示, 从图1中可知, 使用CNN识别煤矿突水光谱图像的过程更为简便。
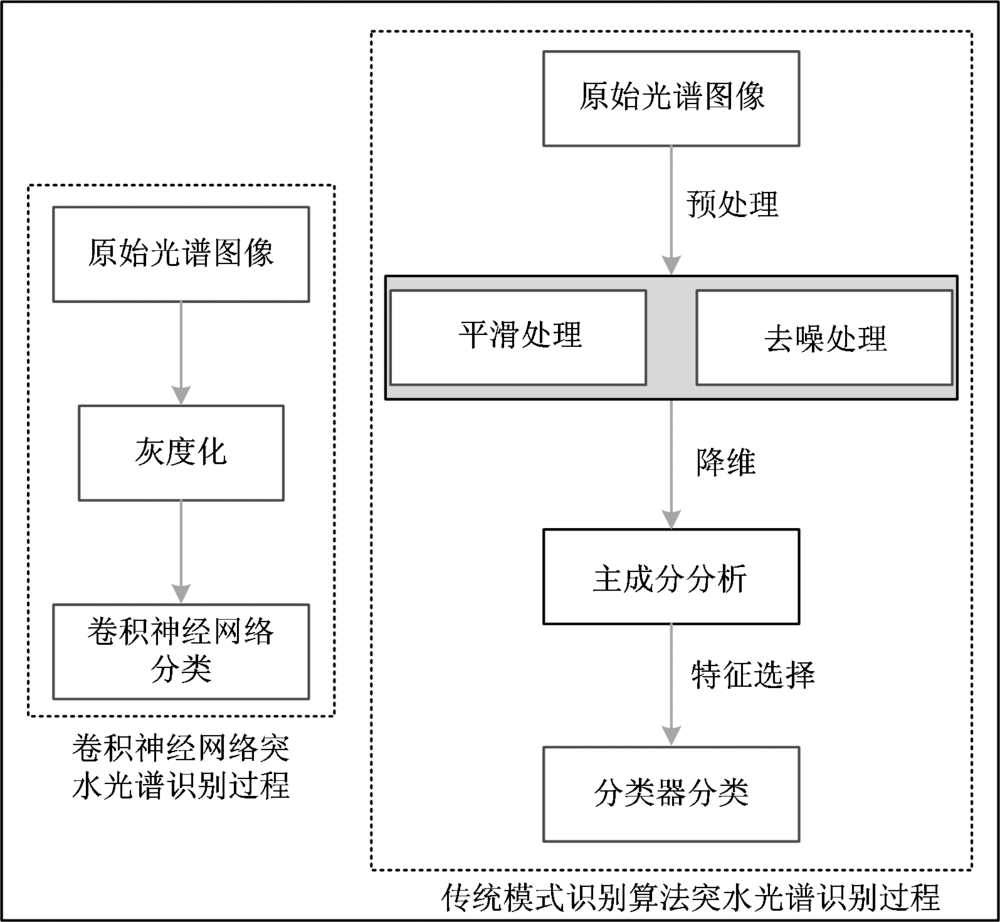 | 图1 水样LIF光谱分类过程简图Fig.1 Water sample LIF fluorescence spectrum classification process sketch |
CNN从第三层开始就能识别出较为复杂的纹理特征, 从第四层开始就能识别出了较为完整的个体轮廓和形状特征[15]。 对于二维荧光光谱曲线图而言, 理论上三个卷积层即达到分类要求。 实验中, 为加快网络的训练速度, 选用三个卷积层的卷积神经网络, 卷积层和池化层交替连接。 本实验CNN输入图像大小为60× 60的光谱曲线的灰度图片。 卷积层C的卷积核全为5× 5, 步长为1, 池化层采用最大池化法, 池化核大小为2× 2, 步长为2, 每个卷积层后都连接一个池化层。
物质吸收能量后辐射光即为荧光, 高能量激光照射物质可诱导其发出荧光, 荧光光谱是通过测量荧光物质的发光强度随激发光波长变化而获得的光谱, 物质不同、 浓度不同, 荧光光谱都会有差异, 因此激光诱导荧光技术能较好的反映物质的特异性。 突水水源荧光光谱采集系统的光路部分主要由发射波长为405 nm的激光器、 检测范围为400~800 nm的USB2000+光谱仪、 采用直角光路系统的浸入式微型荧光探头和石英光纤组成。
根据煤矿矿井中水层的分布特点, 科学的选取了煤矿奥陶系灰岩岩溶水和煤系砂岩裂隙水。 根据矿井最常见的煤矿突水类型, 突水水样的样本选为老空水。 为使系统在矿井突水后不同水源发生混合时也能快速识别出突水类型, 实验中也把混合水作为研究对象。 选用两种混合水作为研究对象, 分别为灰岩水和老空水的混合水、 砂岩水和老空水的混合水, 为方便获取实验数据, 混合水的比例以5:5中心向两边等梯度扩展, 比例范围在4:6和6:4之间。
2017年3月31日在淮南谢桥煤矿中获取实验所需要的水样样本, 密封后带回实验室。 实验中, 每种水样各采集40组荧光光谱图, 其中30组用于分类算法的训练, 剩余10组用于分类算法的测试。 老空水、 灰岩水和砂岩水的光谱图如图2所示。
 | 图2 原始水样LIF光谱Fig.2 LIF spectra of raw water samples |
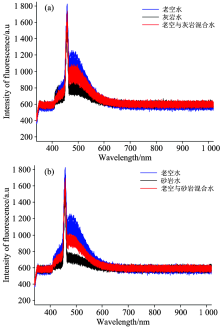
图2为三种原始水样的40组荧光光谱曲线对比图, 从图2中三种原始水样的40组LIF光谱图差异性不大可知, 一般的模式识别算法难以有效的分类三种原始水样。 图3中, (a)为老空、 灰岩及其混合水40组数据的荧光光谱曲线图, (b)为老空、 砂岩及其混合水40组数据的荧光光谱曲线图。
 | 图3 混合水样LIF光谱 (a): 老空水、 灰岩水及其混合水; (b): 老空水、 砂岩水及其混合水Fig.3 LIF spectra of mixed water samples (a): Goaf water, linestone water and its mixed water; (b): Goaf water, sandstone water and its mixed water |
实验中, 将最常用的模式识别算法PCA-BP神经网络和CNN做了详细的对比, 分别测试了老空水、 砂岩水、 灰岩水的识别, 老空水、 砂岩水及其混合水的识别, 老空水、 灰岩水及其混合水的识别。
主成分分析(PCA)是一种统计方法, 通过正交变换将一组可能存在相关性的变量转换为一组线性不相关的变量, 从而实现数据的降维。 文中使用PCA对光谱数据进行降维, 降维后主成分因子累积占比如表1。
| 表1 不同主成分累积贡献度 Table 1 Cumulative contribution of different principal components |
实验采集的光谱数据较多, 降维后得到的主成分(即为特征值)也依然较多, 为降低BP神经网络的复杂度, 只选用了贡献率较高的主成分作为BP网络的输入。
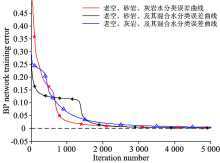
特征值的选择具有个人主观因素, 合适的特征选取需要大量的实验, 文中分别测试了BP神经网络输入为3个、 5个和7个特征值的分类效果, 分类测试结果如表2所示。 BP神经网络训练误差曲线如图4所示。
| 表2 不同主成分的水样分类结果 Table 2 Classification results of water samples with different principal components |
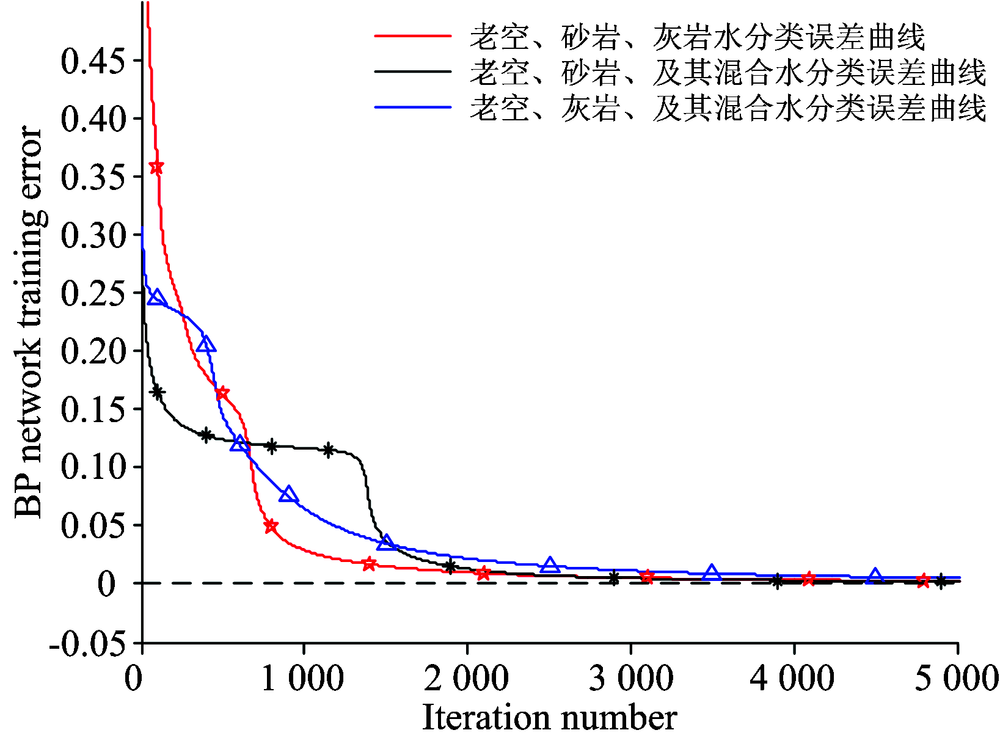 | 图4 PCA-BP神经网络训练误差曲线Fig.4 Training error curve of PCA-BP neural network |
表2中, 原始水样为老空水、 砂岩水、 灰岩水, 混合水一为老空、 砂岩及其混合水, 混合水二为老空、 灰岩及其混合水。 从表2中可知, 特征值选取的不同, 水样的分类结果也不相同, 反映出传统算法的分类效果严重依赖特征值选取的合适与否。 就本实验而言, 若要在三种情况下都能实现水样最高精度的分类, 就必须改变BP网络输入神经元的数目, 这在实际情况下并不适用。
图4中, BP神经网络输入的主成分数为5个, 网络的训练共迭代10 000次, 为在图中更直观反映各误差曲线变化趋势, 图4中只画出了网络前5000次迭代的误差曲线。 从误差曲线图可知, 三种情况下, BP神经网络的训练误差随着网络迭代次数的增加都趋于零, 但老空水、 砂岩水及其混合水的训练误差曲线相对不平稳。
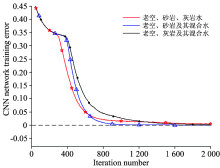
CNN的水样分类测试结果如表3所示, 每种情况下共测试10次, 取平均测试结果。 CNN的训练误差曲线如图5所示。
| 表3 CNN算法分类结果 Table 3 Classification results of CNN algorithm |
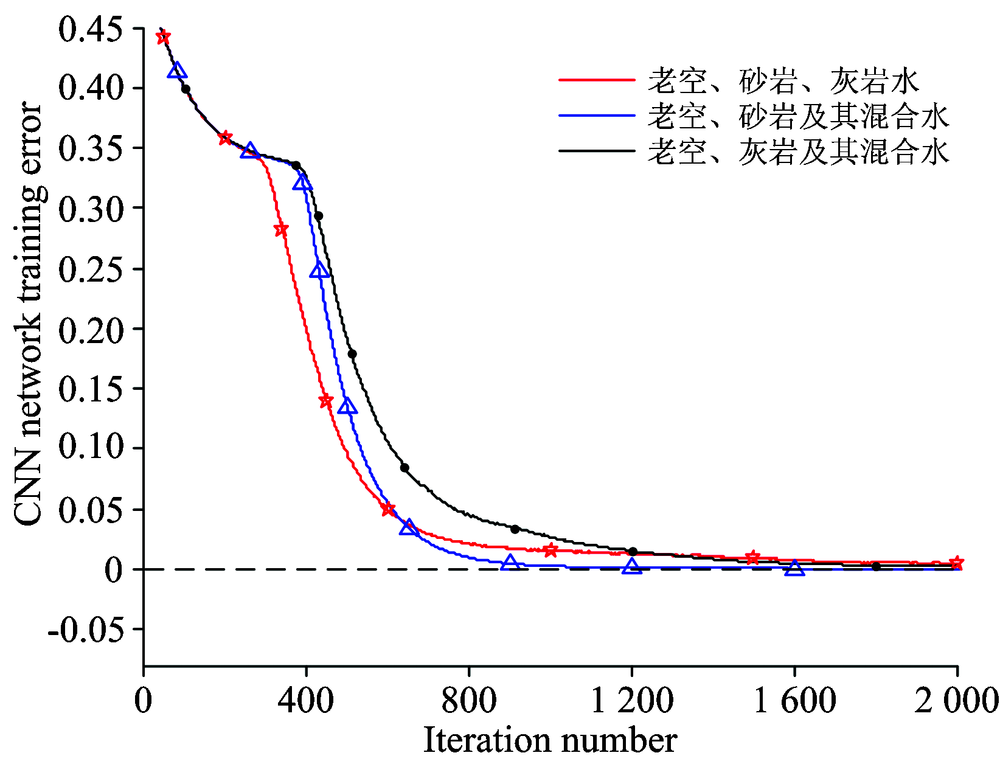 | 图5 CNN训练误差曲线Fig.5 Training error curve of CNN |
实验中, CNN的训练共迭代3 000次, 为在图中更直观反映各误差曲线变化趋势, 图5中只画出了前2 000次迭代的误差曲线。 从表3可知, 三种情况下, CNN都能100%的识别矿井水源。 从实验结果可知, CNN对煤矿突水水源类型的识别效果比BP神经网络更好。
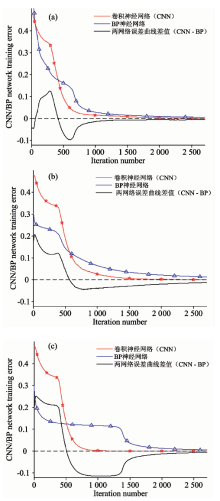
CNN和BP神经网络两分类算法的网络训练误差对比如图6示, 蓝色曲线为BP神经网络的误差曲线, 红色曲线为CNN的误差曲线, 黑色曲线是在相同迭代次数下, CNN的训练误差值减去BP神经网络的训练误差值。 (a)为老空水、 砂岩水、 灰岩水的分类误差曲线, (b)为老空水、 灰岩水及其混合水的分类误差曲线, (c)为老空水、 砂岩水及其混合水的分类误差曲线。
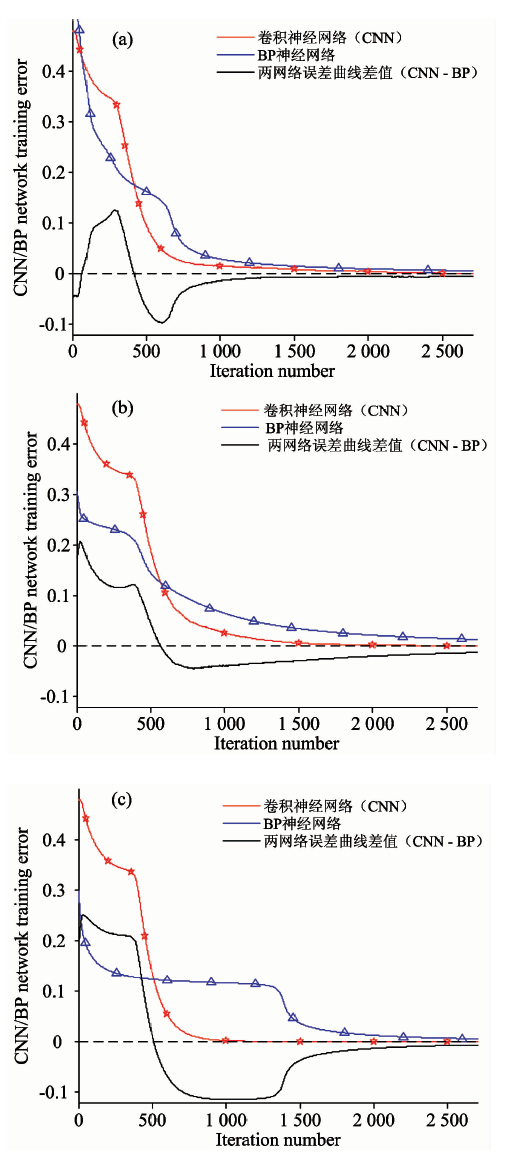 | 图6 CNN和BP的网络训练误差对比 (a): 老空水、 砂岩水、 灰岩水; (b): 老空水、 灰岩水及其混合水; (c): 老空水、 砂岩水及其混合水Fig.6 Training error contrast between CNN and BP (a): Goaf water, sandstone water and linestone water; (b): Goaf water, linestone water and its mixed water; (c): Goaf water, sandstone water and its mixed water |
从图6(a)— (c)中两算法的误差差值曲线变化趋势可知, CNN的初始误差高于BP神经网络的初始误差, 但是CNN的收敛速度明显快于BP神经网络的收敛速度, 大约经历600次迭代, CNN的误差就已低于BP神经网络的误差, 大约经历1 000次迭代时, CNN的网络训练误差近似为零。 从CNN和BP神经网络的对比可知, 在煤矿突水水源光谱识别中, CNN的网络收敛速度更快。
CNN的输入是整个光谱图, 通过网络的学习获取最具有表达能力的特征, 而BP神经网络的输入为人工设计的特征, 所以CNN的初始误差和误差收敛速度都会高于BP神经网络, 并能实现突水水源光谱的高精度分类。
利用LIF技术快速的获取同一煤矿三种原始水样和两种混合水样的荧光光谱图, 灰度化后作为CNN分类算法的输入进行识别, 并建立了PCA-BP识别模型进行识别过程和识别结果对比。 虽然CNN结构比BP神经网络复杂的多, 但实验结果显示, CNN算法在煤矿突水LIF光谱识别中省去繁琐的数据处理和特征提取工作, 并实现三种原始水样和两种混合水样的100%识别, 表明, CNN算法结合LIF技术的煤矿突水类型识别方法具有较好的应用前景。 此外, 将深度学习算法CNN应用于煤矿突水LIF光谱图像的识别, 也为CNN算法在其他领域光谱识别提供了指导。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|