


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于激光拉曼光谱的水面油膜厚度测量方法研究
[蔡宗岐1  , 冯巍巍
, 冯巍巍1, 2, * , 王传远1 ]
, 冯巍巍|
|


作者简介: 蔡宗岐, 1987年生, 中国科学院烟台海岸带研究所工程师 e-mail: zqcai@yic.ac.cn
为了实现水体表面油膜厚度的快速非接触检测, 基于激光拉曼光谱检测技术, 搭建了水体表面油膜厚度拉曼光谱检测系统。 以532 nm激光作为激发光源, 以常见的柴油和汽油为例研究了不同油品的拉曼光谱特性, 研究结果表明, 油膜拉曼光谱响应特性与油品密切相关, 相同油膜厚度情况下不同油品的拉曼光谱曲线有明显的差异, 97#汽油在1 651 cm-1光谱强度要高于90#汽油。 随着油膜厚度的增加, 柴油316和1 451 cm-1光谱强度和汽油1 651 cm-1拉曼位移光谱强度增加, 油拉曼光谱信号变强; 根据油水界面拉曼光谱特征, 设计了油膜厚度计算因子, 实验证明随着油膜厚度增加, 油膜厚度计算因子 rfilm呈下降趋势。 可以将油膜厚度计算因子作为水体表面油膜厚度测量的一种依据。
In order to realize the fast and non-contact detection of oil film thickness on water surface, a system based on laser Raman spectroscopy technologywas introduced in this paper. The 532 nm laser was used as the exciting source, and the result shows there is obvious difference between the Raman spectra of diesel and gasoline on water surfacewhich have the same oil film thickness, the spectral intensity of 97# gasoline is stronger than that of 90# gasoline at 1 651 cm-1. With the increase of oil film thickness, the spectral intensities of 316, 1 451 and 1 651 cm-1 are enhanced, the calculation factor rfilm of oil film thickness shows a decreasing trend. The experiment result shows that the Raman spectroscopy can be used as a reference for oil film thickness inthe application.
随着国民经济的高速发展, 我国的江河、 湖泊以及海洋环境水体也遭受了严重的破坏。 其中, 轮船排污、 运油船只泄露及海面石油钻井泄露等溢油事故时有发生, 水面油污染已经十分突出, 这种情况在经济较为发达的海岸带地区尤为严重。 排入水体环境的石油造成了严重的环境污染, 不仅损害生物资源, 也会危害人类健康, 同时造成严重的经济损失。 及时获取水体表面油膜信息, 鉴别油品、 测量油量, 对水体环境的保护具有重要意义。
近些年来, 水体表面油膜厚度测量成为热点[1, 2, 3, 4]。 对于溢油油膜厚度的估算, 国际上通常采用《波恩协议》中的建议。 目前对于油膜厚度的无损检测并没有形成一种统一的标准, 主要的测量方法包括反射光谱法、 差分激光三角法和激光遥感荧光光谱法。 孙兰君[5]等对溢油海水双向反射分布函数(BRDF)进行了建模及仿真, 发现海水的BRDF值随油膜厚度及溢油浓度的增加而减小。 吴頔[6]等研制了基于垂直入射式差分激光三角法原理的浮标式油膜厚度测量传感器, 发现其测量相对误差最大值为0.707 1%。 Liu[7]等研究了一种基于时间分辨荧光结合激光遥感平行因子检测溢油的方法, 发现该方法可以对油的类型进行分类, 并且具有较高的识别率。 但以上方法都存在自身的不完善性, 测量精度普遍偏低。 前期我们对几种典型石油类污染物的紫外激光诱导荧光光谱特性进行了研究, 发现不同种类的样品光谱特征具有较大的差异。 在油膜厚度探测方面, 尽管荧光强度与油膜厚度存在相关性, 但在实际应用中, 由于水体中黄色物质、 叶绿素等成分均存在荧光效应, 给油膜厚度测量带来了很大困难。
拉曼光谱是光照射到物质表面发生非弹性散射产生的, 拉曼光谱的位移和谱带强度与其分子的振动和转动能级相关[8]。 通过该特征可对被测物质进行定性分析, 还可利用拉曼特征峰强度与物质分子浓度成正比的关系[9]进行定量分析。 一般来说, 石油及其提炼产品具有大致相同的物理化学性质, 但是对于不同的油品存在着一定的差异, 从而造成了拉曼光谱存在差异, 且这种特征具有“ 指纹性” 。 利用拉曼光谱特征的高选择性, 使在复杂干扰条件下实现油膜厚度测量具有明显的技术优势。
为了研究不同种类油品不同油膜厚度的拉曼光谱, 搭建了一套激光拉曼光谱探测系统, 利用激光作为激发光源, 以3种典型成品油作为样本, 测量了其拉曼光谱, 分析了不同油品的拉曼光谱特征, 并探讨了在不同油膜厚度情况下的拉曼光谱响应特征, 给出了油膜厚度计算方法, 证明了可行性。
几种典型激发波长激发的水的拉曼峰及相应的拉曼波数偏移如表1所示。 由表可知不同的激发波长所激发的水的拉曼峰不同, 随着激发波长的增加, 水的拉曼峰位红移更加明显, 但是水的拉曼波数偏移基本保持不变(3 400 cm-1左右), 本文选用532 nm激光光源作为激发光源分析所激发的拉曼光谱。
| 表1 不同波长激发的水的拉曼峰位及拉曼波数偏移峰位 Table 1 Raman peak and Raman peak shift of water excited by different wavelengths light source |
当水体表面被油膜覆盖时, 其两个水拉曼光谱强度比值如式(1)所示[10]
式中r0为纯水时在波长λ 1和λ 2处两个拉曼光谱强度比值, rfilm为有油膜覆盖时在波长λ 1和λ 2处两个拉曼光谱强度比值, 定义为油膜厚度计算因子, k(λ 1)和k(λ 2)分别为在波长λ 1和λ 2处的衰减系数, d为油膜厚度。 由式(1)可知
式(2)中, k(λ 1), k(λ 2)和r0为常数, 所以油膜厚度可通过测量油膜厚度计算因子rfilm求得。
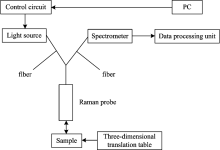
实验测量系统示意图如图1所示, 系统包括光学探测单元和控制与数据处理单元2部分组成, 其中光学探测单元由532 nm激光光源、 Y型光纤、 拉曼探头和海洋光学HR4000型光谱仪组成, 控制与数据处理单元包括控制电路、 三维平移台、 数据处理单元和计算机。 具体实验测试系统如图2所示。 计算机通过光源控制电路控制光源发射激光, 发射激光经入射光纤和拉曼探头后作用于待测样品激发拉曼光谱信号, 激发拉曼光谱信号经接收光纤被光谱仪采集处理, 采集处理的光信号经数据处理模块进行数据处理后由计算机进行处理后显示。 系统测量过程给样品配一个三维平移台, 用来调整样品与拉曼探头之间的距离, 保证采集拉曼光谱信号最佳。
 | 图1 测量系统示意图Fig.1 Schematic of the measurement system |
 | 图2 实验测试系统图Fig.2 Experimental test system |
样品制作流程: 选用直径一定的培养皿, 加入相同水量, 分别在水面滴加不用量的油品, 根据V=Sd(V为体积, S为面积, d为厚度), 可计算所加油品后的油膜厚度。
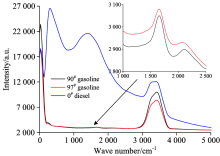
相同油膜厚度(23.40 μ m)的3种不同油覆盖水面时的拉曼光谱图如图3所示, 由图可知, 汽油与柴油的拉曼光谱曲线有明显的差异, 这主要是由于柴油的主要成分是C10— C22烃类, 汽油的主要成分是C5— C12脂肪烃、 环烷类和少量的芳香烃。 不同的成分导致不同的拉曼峰位出现。 实验结果表明, 不同的油品由于化学成分不同, 呈现不同拉曼特征。 其中316和1 451 cm-1拉曼位移为柴油特有的拉曼位移, 1 651 cm-1拉曼位移为汽油特有的拉曼位移, 3 425 cm-1为水特有的拉曼位移。 在1 651 cm-1拉曼位移处97#汽油的拉曼光谱强度要高于90#汽油的拉曼光谱强度; 对于90#汽油和97#汽油覆盖水面时, 对应的3 425 cm-1处水的拉曼光谱强度97#汽油要明显弱与90#汽油。
 | 图3 相同油膜厚度(23.40 μ m)的三种不同油覆盖水面时的拉曼光谱Fig.3 The Raman spectra of 3 different oils on water surface with the same oil film thickness (23.40 μ m) |
为了测试不同油膜厚度的拉曼光谱响应特性, 在水表面依次滴加90#汽油、 97#汽油和0#柴油, 对拉曼光谱进行了测量。 90#汽油的油膜厚度依次为11.7, 23.40, 35.09, 46.79和58.49 μ m, 97#汽油的油膜厚度依次为11.7, 23.4, 29.24, 35.09和40.94 μ m, 0#柴油的油膜厚度依次为5.85, 11.7, 17.55, 23.4和29.24 μ m。
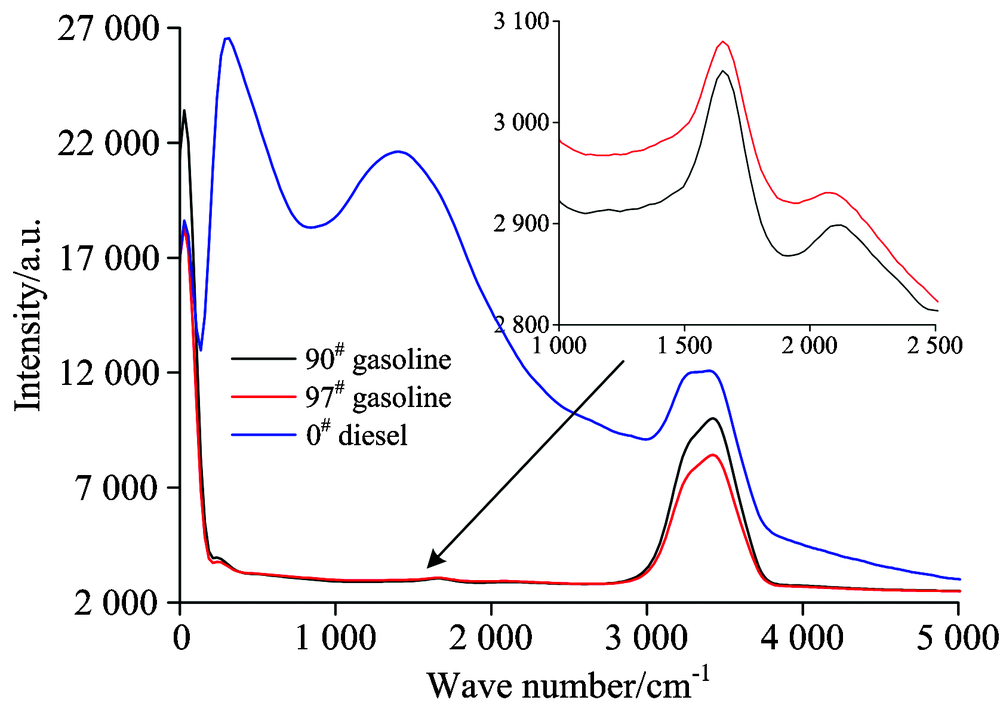
图4中(a), (b)和(c)分别为不同油品的拉曼光谱图。 由图可以看出, 随着油膜厚度的增加柴油316和1 451 cm-1拉曼位移光谱强度和汽油1 651 cm-1拉曼位移光谱强度均出现增加趋势, 表明不同油品的拉曼信号均随着油膜厚度的增加逐渐变强。
 | 图4 水面不同90#, 97#汽油和0#柴油油膜厚度的拉曼光谱Fig.4 The Raman spectra of 90# gasoline, 97# gasoline and 0# diesel on water surface under different oil film thickness |
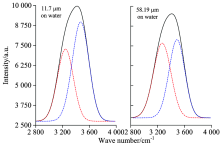
为了对油膜厚度进行反演, 需要对油水界面的混合拉曼峰进行光谱分离。 从理论上分析, 单一水体或者油成分的拉曼峰可以用高斯函数来表征[11], 油水界面的拉曼混合峰可以表示为
图5为不同油膜厚度的水的拉曼光谱图, 水的拉曼光谱是由2个高斯曲线拟合而成的。 油膜厚度计算因子rfilm为2个高斯曲线位置光谱强度的比值, 本文中选用3 425 cm-1拉曼位移进行分峰处理, 所得2个峰的峰位分别是3 247和3 478 cm-1。 由图可以看出, 油膜厚度不同水的拉曼光谱强度不同, 从而高斯曲线不同。 油膜厚度增加水的拉曼光谱强度下降, 油膜厚度计算因子rfilm降低。 图6数据为采用图5方法进行分峰处理后三种油品的油膜厚度计算因子rfilm数据图, 分析结果可以看出随着滴加成品油的增加, 油膜变厚, 油膜厚度计算因子rfilm呈下降趋势。
 | 图5 不同油膜厚度的水的拉曼光谱Fig.5 The Raman spectra of the different oil film thickness |
 | 图6 不同油膜厚度的三种不同油覆盖水面时的rfilm比值Fig.6 The rfilm ratio of 3 different oil with the different oil film thickness |
本文主要对三种不同类型成品油的油膜厚度进行了研究, 结果表明随着油膜厚度的增加, 油膜厚度计算因子呈下降趋势, 因此可以将油膜厚度计算因子作为水体表面油膜厚度测量的一种依据。 研究发现不用油品的油膜厚度计算因子并不相同, 混合油品油膜厚度计算因子的测量更为复杂, 对于混合油品油膜厚度的测量计算需要与油品种类鉴定工作结合进行。
采用一种激光拉曼光谱实现对水体表面油膜厚度测量的新技术。 利用532 nm激光作为激发光源, 测量了三种不同类型成品油的拉曼光谱。 测量结果表明, 柴油与汽油的拉曼光谱存在较大的差异, 并且随着油膜厚度的增加, 柴油316和1 451 cm-1拉曼位移光谱强度和汽油1 651 cm-1拉曼位移光谱强度增加, 油拉曼光谱信号变强, 油膜厚度计算因子rfilm呈下降趋势, 90#汽油和97#汽油的油膜厚度计算因子基本一致, 但0#柴油的油膜厚度计算因子与汽油相比有一定差距; 在一定的油膜厚度范围内, 油膜厚度与计算因子成线性关系。 因此, 水体表面的激光拉曼光谱可以作为水体表面溢油的油膜厚度测量的一种依据。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|