
{kind=link}
{kind=link}
{kind=link}
海南岛沿岸海域水体漫衰减系数光谱分析及LiDAR测深能力估算
[丁凯1, 2  , 李清泉
, 李清泉1, 2, * , 朱家松1, 2 , 汪驰升1, 2, 3, * , 崔扬1, 2 , 管明雷1, 2 , 王丹1, 2 , 樊星4 ]
, 李清泉, 朱家松, 崔扬|
|


作者简介: 丁 凯, 1985年生, 深圳大学信息工程学院信息与通信工程博士研究生 e-mail:dingkai@szu.edu.cn
机载激光雷达测深是近年来蓬勃发展的主动式水深测量方法, 能够快速精准地获取近岸水深和水下地形, 特别是对于浅海、 岛礁等船只无法达到的区域具有显著优势。 而机载激光雷达系统的测深能力主要受到水体浑浊度的影响。 激光测深实验中对实验区域的水体浑浊度研究将有助于实验方案的设计。 以中国海南岛沿岸海域为例, 研究了该海域水体浑浊度和机载激光雷达测深系统CZMIL(coastal zone mapping and imaging LiDAR)测深能力之间的关系, 建立了运用水体漫衰减系数估算机载激光雷达测深系统测深能力的算法。 首先分析并确定了实验区域的漫衰减系数 Kd(490)反演算法; 其次, 运用该区域实测光学数据建立了漫衰减系数 Kd(490)和 Kd(532)之间的数值关系; 接着总结了 Kd(532)和CZMIL系统最大测深值之间的关系; 最后运用MODIS数据合成了海南岛沿岸海域在CZMIL系统海道测量模式下的测深能力空间分布图, 重点分析了海口和陵水附近海域的最大可测水深分布情况。 为海南岛沿岸海域开展激光测深实验提供了参考和依据。
, LI Qing-quan, ZHU Jia-song, CUI YangAirborne LiDAR bathymetry is an active bathymetry method developed in recent years, which can quickly and efficiently obtain the water depth and underwater topography, especially plays an important role in surveying on shallow water and islandreefs where ships are not accessible. In general, the maximum detectable water depth of airborne LiDAR bathymetry systemis mainly affected by the turbidity of water. Therefore, a detailed study of water turbidity of the experimental regionin advance will contribute to design the experimental scheme. In this paper, taking the coastal waters of Hainan Island in South China as an example, we studied the relationship between turbidity of water and the bathymetry performance of an airborne LiDAR bathymetry system named CZMIL (coastal zone mapping and imaging LiDAR), and presented an algorithm that can estimate the spatial distribution of maximum CZMIL detectable water depth in the coastal waters of Hainan Island by using the values of diffuse attenuation coefficient of sea water. Firstly, we studied the Kd(490) inversion algorithm in the experimental water region. Secondly, the relationship between the diffuse attenuation coefficient Kd(490) and Kd(532) was established by using the measured optical profile data in this region. Then, the relationship between the diffuse attenuation coefficient Kd(532) and the maximum CZMIL detectable depth was summarized. Finally, the spatial distribution of Kd(532) and maximum CZMIL detectable depth in the coastal waters of Hainan Island were retrieved by using MODIS data. What’s more, the distribution of maximum CZMIL detectable depth in the coastal waters of Haikou City and Lingshui City are analyzed emphatically. The results provide a reference for the LiDAR bathymetric operation in the coastal waters of Hainan Island.
近岸水深是海岸带环境的重要要素, 水深测量数据在航运安全, 近岸设施建设, 海洋科学研究, 海岸带环境监测和管理等方面发挥着重要的作用[1]。 传统测深方法是用船载铅垂线或声呐测量, 前者受水流影响较大, 测点稀疏, 后者难以测量船只无法到达的区域, 两种方法都比较费时、 费力, 且成本较高。 随着遥感技术的发展, 通过SAR和多光谱等数据进行水深遥感反演可以快速获取大范围水域的水深值, 但是该方法的测量精度难以得到保证[1, 2]。
机载激光雷达测深(airborne LiDAR bathymetry, ALB)是近年来蓬勃发展的一种主动式的水深测量方法, 通过发射能够穿透水体的蓝绿波段激光(532 nm)进行水深测量。 Hickman等[3]于1968年验证了激光测深的可行性, 相比于传统的测深方法, 激光测深具有高精度、 高分辨率、 灵活机动、 快速高效的特点, 特别是在近岸水深测量、 海岸带测绘等领域发挥着重要的作用[4, 5]。 而ALB系统的测深能力主要受到水体浑浊度的影响, 通常情况下, 海水越清澈, 浑浊度越小, 激光就更容易穿透海水, 有效测深值则越大[6, 7, 8]。 对于参数固定的ALB系统, 通常用该系统的有效衰减系数来度量水体浑浊度, 系统有效衰减系数与水体浑浊度大小成正比。 Steinvall等[9]根据在波罗的海开展的激光测深实验结果, 给出了ALB系统有效衰减系数和最大可测深度之间的经验关系。 由于系统衰减系数是系统参数、 水质参数和环境的函数, 因此用系统有效衰减系数估算激光测深能力相对比较复杂[10]。 Guenther等建立了系统有效衰减系数和漫衰减系数之间的经验关系, 漫衰减系数比较容易测量, 因此可以通过测量水体漫衰减系数估算ALB系统测深性能[4, 11, 12]。
传统测量漫衰减系数的方式主要是运用船载或者岸基的测量系统(赛奇盘等仪器)进行实地测量[13, 14], 但是这种方法费时费力, 也难以获取大面积水域的漫衰减系数空间分布。 随着海色遥感技术的兴起, 运用星载光谱数据可以反演漫衰减系数, 主要方法是通过卫星搭载的传感器获取海水不同深度的辐照度, 并进行指数回归从而计算漫衰减系数值。 但是国际上通用的漫衰减系数反演算法不具有普适性, 特别是对于近岸Ⅱ 类水体, 还需通过现场实测数据建立运用遥感反射比反演水体漫衰减系数的统计反演模式[7, 15, 16]。
针对我国黄海、 东海区域的水质特点, 王晓梅等[16]根据黄海、 东海实测水色数据, 建立了黄海、 东海海域二类水体的漫衰减系数和透明度的统计反演模式, 同时建立了490 nm与其他波段漫衰减系数之间的经验关系式。 李凯等[17, 18]在研究中国现有黄海、 东海海域漫衰减系数反演算法的基础上, 利用2003年水色测量数据分析得到实验海域Kd(490)与Kd(532)之间的关系, 结合MODIS的二级数据Kd(490)产品, 评估了在CZMIL海道测量模式下黄海、 东海海域的最大可测深度的空间分布情况。 崔廷伟等[19]运用2005年渤海近岸水域水体生物光学数据集, 反演了水体遥感反射率光谱Rrs(λ )数据的490 nm波段漫衰减系数的反演模型, 同时以ENVISAT MERIS数据为例, 给出了渤海的Kd(490)空间分布情况。 在上述文献报道的实验研究基础上, 我们运用MODIS数据和水色光谱实测数据, 研究了海南岛沿岸海域漫衰减系数光谱遥感反演算法, 根据漫衰减系数Kd(532)的分布情况, 估算了该海域在CZMIL海道测量模式下的最大可测水深的空间分布。 本方法可以快速有效的评估实验水域的ALB系统的测深能力, 为海南岛沿岸海域开展激光雷达测深实验提供了依据。
根据光辐射传递理论, 光穿透水面到水体深处的过程中, 光辐照度会随着深度增加而指数衰减。 1980年, Duntley和Gordon等[20]给出了向下辐照度漫衰减系数的定义
其中Kd(λ , D)表示向下辐照度漫衰减系数, λ 表示入射光波长, D表示水深, Ed (λ , D)表示水深D处的向下辐照度。 式(1)的物理含义是指当单色漫射光能量穿透水面, 经过dD距离后, 由于海水的吸收和散射作用而引起的单色漫射光能量衰减为dEd(λ , D), 其中比例系数Kd(λ , D)即为海水的向下辐照度漫衰减系数。 同理还可以定义向上辐照度漫衰减系数, 在此主要使用向下辐照度漫衰减系数Kd估算ALB系统测深性能。
1978年10月, 世界上第一代海色卫星传感器CZCS(the coastal zone color scanner)诞生[21], 该传感器搭载在Nimbus-7卫星上, 用来研究全球海洋生物资源。 科学家开始研究通过海色卫星传感器的遥感影像数据反演Kd(490)的算法, 众多经验和半分析算法被提出。 1981年, Austin等[22]在CZCS基础上, 建立了Kd(490)和蓝(443 nm), 绿(550 nm)两个波段离水辐亮度比值之间的经验关系式
其中, Lu(443)和Lu(550)分别表示蓝绿波段的向上光谱辐亮度值, Kw(490)表示纯水的漫衰减系数值, 大小为0.022 m-1。
1986年, Austin等建立了Kd(490)和其他波段Kd(λ )之间的经验关系[23]
通过该经验关系式, 可以运用Kd(490)计算其他波段Kd值。
2000年, Mueller等根据现场实测的漫衰减系数和归一化离水辐亮度值, 用统计的方法推算出Kd(490)和Lwn(490)/Lwn(555)的经验关系式, 如式(4)所示
其中Lwn表示归一化离水辐亮度。 第二代海色传感器SeaWiFS将该方法作为数据处理的标准业务化算法[24]。
2007年, Morel等根据漫衰减系数、 叶绿素浓度、 遥感反射比三者之间的关系反演Kd, 通过叶绿素浓度和遥感反射比之间的经验关系推算出叶绿素浓度

其中, Rrs表示在特定波长λ 下遥感反射率(remote sensing reflectance, Rrs), [Chla]表示叶绿素a浓度(mg· m3)。
| 表1 式(5)中VIIRS和MODIS传感器系数值 Table 1 Values of the coefficients for VIIRS and MODIS sensors in equation (5) |
接下来, 根据漫衰减系数和叶绿素浓度之间的经验关系推算漫衰减系数Kd(490)[25]
目前, CZCS, OCTS, MODIS-Aqua/Terra, MERIS, SeaWiFS, VIIRS等星载传感器均是采用(Morel等, 2007)向下辐照度漫衰减系数反演算法[26]。 该算法在大洋开阔水体(Ⅰ 类水体)比较适用, 但是中国南海北部海域Ⅰ 类水体和Ⅱ 类水体并存, 水体光学性质较为复杂[27], 上述国际通用的漫衰减系数反演算法并不完全适用于南海北部区域(如海南岛沿岸海域)。 王桂芬等[27, 28]根据2003年— 2005年中国南海北部区域收集的水体光学数据, 建立了南海北部区域漫衰减系数和遥感反射比之间的经验关系式
该算法得到的Kd(490)和实测Kd (490)的决定系数R2为0.856, 均方根误差RMSE为0.094 m-1。 海南岛沿岸海域属于该算法适用的范围, 因此我们选取该算法。
采用的机载激光测深雷达系统是Teledyne Optech公司旗下的CZMIL测深系统(coastal zone mapping and imaging LiDAR, CZMIL)。 CZMIL采用的是蓝绿波段(532 nm)和红外波段(1 064 nm)双激光[29]。 根据文献可知, CZMIL系统测深范围为0~80 m, 在CZMIL海道测量模式下, 当底部反射率大于15%时, 最小测深深度小于0.15 m, 测量点密度为2 m× 2 m, 单脉冲最大测深深度近似为[30]
式(8)中, 白天时段右侧值为3.75, 夜晚时段右侧值为4.0。 CZMIL系统蓝绿激光的波长为532 nm, 因此评估其测深能力的漫衰减系数应为Kd(532), 然而通过MODIS光谱影像数据反演得到漫衰减系数Kd(490), 因此需要建立Kd(532)和Kd(490)之间的关系, 将Kd(490)转化为Kd(532)。
ALB系统测深能力估算主要为以下几个步骤:
(1) 选择并确定Kd(490)反演经验关系式;
(2) 运用反演经验关系式, 通过MODIS遥感反射比数据得到Kd(490);
(3) 通过水色试验数据, 建立Kd(490)与不同波段Kd(λ )之间的关系, 再使用回归和内插的方法求出Kd(490)和Kd(532)之间的关系, 将Kd(490)转化为Kd(532);
(4) 根据式(8), 推算出最大探测深度值Dmax。
具体流程如图1所示。
 | 图1 ALB系统测深能力估算流程图Fig.1 The flowchart of Airborne LiDAR Bathymetry system performance estimation |
采用的水色数据是由中国科学院南海海洋研究所提供的2003年— 2005年秋季南海北部海域水色实验数据[27, 28]。 该实验分两次进行, 第一次是2003年秋季对广东省海岸线南部海域进行实地采样测量, 第二次是2004年— 2005年对南海北部区域(包括海南岛及周边岛屿)进行实地采样测量。 其覆盖范围为18° N— 24° N, 109° E— 118° E。 该数据涵盖了近岸的二类水体到大洋的一类水体, 利用分光辐射谱仪测量了7个波段(412, 443, 490, 520, 555, 620, 683 nm)的向下辐照度Ed(z, λ ), 向上光谱辐亮度Lu(z, λ )和海表面入射光谱辐照度Es(0, λ )。 运用该数据, 可以计算各波段的向下漫衰减系数Kd(λ )和遥感反射比Rrs(λ )。
CZMIL系统选用Nd∶ YAG激光器, 其中用于探测水底信息的激光选用蓝绿激光, 波长为532 nm, 该波段海水穿透能力最强。 因此对CZMIL系统测深能力估算, 必须知道海水Kd(532)值。 而目前国际上通用的水色遥感标准数据产品是Kd(490) , 因此我们需要将Kd(490)转化为Kd(532)。 根据王桂芬等[27]的研究, 结合式(3), 我们建立了五个波段的Kd(λ )和Kd(490)之间的线性关系, 如表2所示。
| 表2 Kd(490)与其他各波段Kd(λ )之间的线性拟合方程(对应R2, RMSE值) Table 2 Correlation between Kd(490) and Kd(λ ) (R2 and RMSE for the correlation coefficient) |
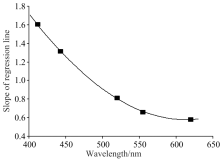
接着, 我们使用412, 443, 520, 555和620 nm这五个波段回归直线的斜率和对应波长进行拟合, 得到了各波段波长和回归直线斜率之间的关系, 拟合结果如图2所示。 其中决定系数R2为0.999 8, 均方根误差RMSE为0.011 12。 对于532 nm波段, 得到A(532)=0.749; 再用内插法, 得到B(532)=0.038 9, 最终得到Kd(532)和Kd(490)之间的关系为
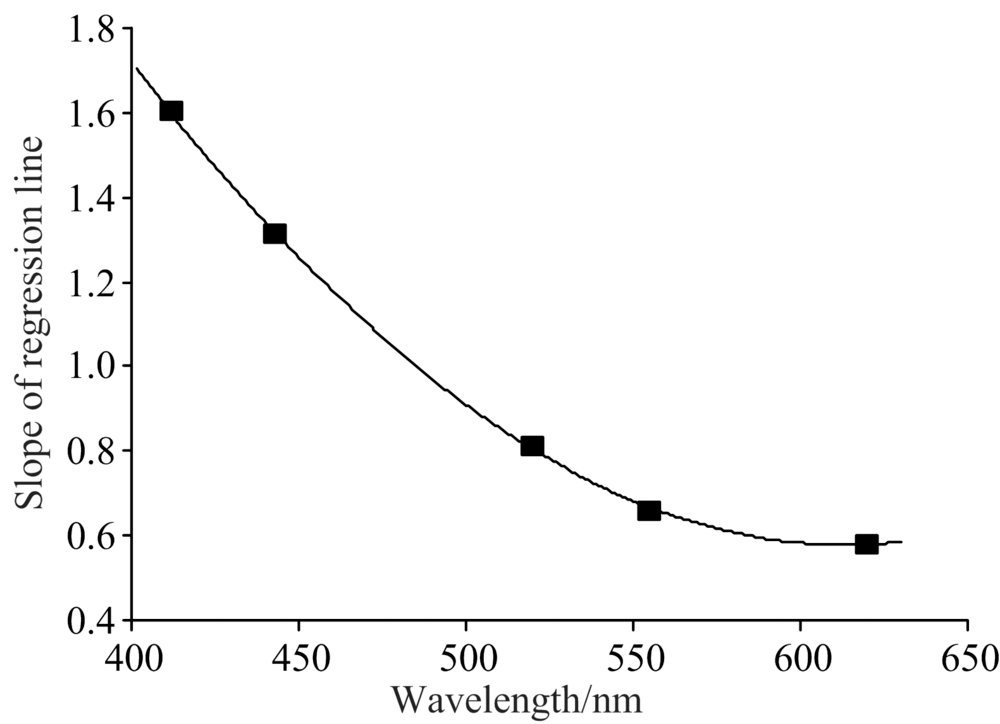 | 图2 各波段波长与回归直线斜率之间的关系Fig.2 Relationship between slope of regression lines and wavelengths |
MODIS是搭载在EOS-Terra (1999年12月18日发射)和EOS-Aqua(2002年5月4日发射) 两个卫星上的重要传感器, 全称为中分辨率成像光谱仪。 MODIS共有36个波段, 其中2个波段分辨率为250 m, 5个波段为500 m, 29个波段为1 000 m, 波长范围从412 nm~14.4 μ m。 Terra每天上午从北到南经过赤道, 而Aqua卫星则每天下午从南到北经过赤道。 Terra-MODIS和Aqua-MODIS 互相配合每两天覆盖整个地球表面一次。 这些数据有助于提高我们对全球陆地, 海洋和低层大气内动态变化的认识和预测, 对于我们制定环境保护政策具有极其重要的指导作用[31]。
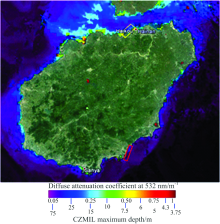
我们选取2014年6月份Aqua-MODIS二级数据中实验区域412和555 nm遥感反射比数据[26], 对CZMIL系统在海南岛沿岸海域的测深性能进行保守估计。 首先利用式(1) 得到该区域漫衰减系数Kd(490), 利用式(9)将Kd(490)归算得到Kd(532); 然后利用式(8)得到CZMIL最大可测深度, 最终得到实验海域CZMIL系统测深性能的空间分布图。 图3是合成的海南岛沿岸海域2014年6月份漫衰减系数Kd(532)和最大测深空间分布图, 漫衰减系数Kd(532)用不同的颜色进行区分, 与之对应的CZMIL最大测量深度标注在漫衰减系数下方。
 | 图3 海南岛海域CZMIL系统测深性能空间分布图, 2014年6月Fig.3 Spatial distribution of CZMIL’ s bathymetric ability in the coastal waters of Hainan Island, June, 2014 |
CZMIL系统在海南岛沿岸海域的最大可测水深约为48 m, 其中海南岛北部沿岸海域的Kd(532)值大于南部沿岸海域, 西部沿岸海域的Kd(532)值大于东部沿岸海域, 而西北部沿岸海域的Kd(532)值则相对偏高。 海口沿岸东北区域水质相对较好, Kd(532)为0.143~0.196 m-1, 最大可测深度为26 m左右; 西南区域水质比较浑浊, Kd(532)为0.545~0.752 m-1, 最大可测深度为7 m左右。 陵水沿岸海域水质相对较好, Kd(532)为0.078~0.135 m-1, 最大可探测深度可以达到48 m左右。
运用2003年— 2005年在中国南海北部海域收集的海洋水体光学数据, 研究了该海域漫衰减系数Kd(490)反演算法, 根据各波段Kd(λ )和Kd(490)之间的线性关系, 推算了CZMIL系统激光发射波段Kd(532)与Kd(490)之间的函数关系。 运用Aqua-MODIS二级数据评估了海南岛沿岸海域在CZMIL海道测量模式下最大可测深度的空间分布, 合成了2014年6月份海南岛沿岸海域CZMIL系统测深能力空间分布图, 重点分析了海口和陵水两个区域沿岸海域最大可测深度分布情况。 本方法可以快速有效的评估实验水域的机载激光雷达系统测深能力; 研究结果为海南岛周边海域开展激光测深作业提供了参考和依据; 该方法同样可以运用于其他激光雷达测深系统和实验水域。
致谢: 感谢中国科学院南海海洋研究所提供的中国南海北部海域实测水色光学数据。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|