

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
日盲紫外域拉曼激光雷达探测大气水汽技术研究
[石冬晨 , 华灯鑫
, 华灯鑫* , 雷宁, 高飞, 汪丽, 闫庆, 周毅]
, 华灯鑫, 雷宁, 高飞, 汪丽, 闫庆, 周毅]
|
|


作者简介: 石冬晨, 女, 1985年生, 西安理工大学机械与精密仪器工程学院讲师 e-mail: shidongchen111@163.com
拉曼激光雷达通过探测与水汽浓度相关的大气水汽振动拉曼散射回波信号, 可实现大气水汽混合比廓线的探测。 然而由于振动拉曼信号非常微弱, 在白天测量时振动拉曼散射光谱会淹没在太阳背景光中, 多在夜间测量。 为实现大气水汽的全天时测量, 设计开发一套日盲紫外波段拉曼激光雷达系统。 该系统选择Nd∶YAG脉冲激光器的四倍频输出—266.0 nm日盲紫外波段作为拉曼激光雷达系统的激励波长, 采用镀高增益介质膜的牛顿式望远镜作为接收器, 同时利用二向色镜和超窄带干涉滤光片设计高效率的高光谱分光系统, 实现了大气氧气、 氮气和水汽振动拉曼散射回波信号277.5, 283.6和294.6 nm的精细提取。 计算仿真结果表明, 臭氧吸收对日盲紫外域拉曼激光雷达探测存在一定的影响, 主要是探测距离的影响; 氮气通道不受白天太阳背景光噪声的影响; 水汽通道存在少量太阳背景光噪声, 对系统探测距离略有影响。 而系统信噪比计算结果表明, 设计的日盲紫外域拉曼激光雷达系统可实现白天3.5 km大气水汽的探测。 实际进行水汽探测时, 可利用氮气和氧气通道反演出臭氧浓度廓线, 修正臭氧对发射波长、 各通道拉曼散射波长的吸收, 进一步提升系统的探测能力和探测精度。
Raman Lidar can detect water vapor mixing ratio by atmospheric water vapor vibration Raman scattering echo signal associated with the water vapor concentration. However, vibration Raman scattering spectra would drown in the sun background light due to the weak Raman scattering echo signal, therefore the measured time is usually at night. All radiation below 300nm known at solar-blind ultraviolet band is absorbed by the ozone layer in the stratosphere. The shorter the wavelength is, the stronger the energy is. To realize the detection of atmospheric water vapor at daytime and night time, a Raman Lidar is developed at a solar-blind ultraviolet band. The system consists of the laser, telescope, photoelectric acquisition and signal processing part. Briefly, the forth harmonic output (ultraviolet 266 nm) of an externally triggered, 10 Hz repetition rate, Nd∶YAG laser is employed as the transmitter. The bore sight assembly uses a turning prism controlled by a New Focus actuator. With 400 mm diameter, 0.5 m rad field of view, a telescope forms the main part of the receiving optics. To obtain signals with fine separation and high efficient extraction, three dichroic mirrors separate out the detection channels by reflecting light with longer wavelengths while transmitting light with shorter wavelengths, a combination of narrow bandwidth (FWHM=1 nm) interference filters is employed to filter the backscattered signal. The rejection rate of the Mie-Rayleigh scattering signals reaches to 10-7. Before reaching the photomultiplier tube (PMT) in each channel, a plano-convex lens is employed to focus the backscattered signal on the front face of the PMT. The backscattered radiation is collected and analyzed at four wavelengths of interest, 266.0 nm for the elastic scattering, 277.6, 283.6 and 294.5 nm for the Raman scattering of O2, N2 and H2O molecules, respectively. The four PMTs output signals are then input into a multi-channel digitizer to record the backscattered signal, which is used to retrieve the water vapor profile. We use the standard atmospheric scattering models and aerosol extinction coefficients, set system of the sampling interval to 80 ns, cumulative average pulse number to 36 000, the signal-to-noise ratios of atmospheric water vapor measurement are simulated. The simulation results show that there exists influence on ozone absorbing mainly at the Solar-blind Ultraviolet Raman Lidar detection range. The signal to noise ratio simulation results show that the measurement height of the designed Solar-blind Ultraviolet Raman Lidar system can be up to 3.5 km during the daytime measurement. The optimal parameters of Lidar system are obtained based on the detailed analysis and the discussion of the SNR of echo signals. It is concluded that this new solar-blind ultraviolet band Raman Lidar system has the advantage of measuring the water vapor in the daytime without the influence of solar background radiation.
水汽是水在大气中的气态形式, 它在大气中的含量仅为0.1%~4%, 是大气中最活跃的成分。 水汽是大气中唯一可以发生相变的成分, 水分子中的羟基能强烈吸收红外辐射, 加剧二氧化碳导致的全球变暖, 直接影响大气辐射场。 水汽不仅对天气过程, 气候变化, 地气系统的能量交换等有重要的作用, 它的含量和垂直分布特性对激光在大气中的传输和大气动力学、 气象学、 全球水文循环和大气化学等大气过程有密切的联系[1, 2, 3]。 因此, 水汽含量的监测对大气环境和人类生产生活具有重要意义。
拉曼激光雷达是近年来发展起来的水汽探测的最有效工具之一。 20世纪60年代末, Melfi和Cooney等利用红宝石激光器首次进行了水汽混合比的激光雷达探测, 获得了水汽廓线, 论证了拉曼激光雷达测水汽的可行性, 但拉曼系统对信噪比要求高, 只能进行夜间观测。 1992年, Whiteman等利用大功率激光器和直径为750 mm的望远镜为接收器, 采用模拟和光子计数相结合的方式, 利用355 nm拉曼雷达探测系统反演了夜间水汽混合比和气溶胶后向散射比等参数的分布特征。 2005年, 华灯鑫、 Takao Kobayashi等成功研制了一台气象观测激光雷达系统, 利用355 nm拉曼雷达探测系统实现了夜间底层大气温湿度廓线的高精度探测[4]。 2008年, 中科院安徽光机所利用355 nm发射波长L625激光雷达, 对合肥地区进行水汽测量和对比实验, 夜晚探测水汽的高度范围从近地面到达对流层中部8 km 左右[5]。 2012年Leblanc等提出了拉曼激光雷达多望远镜扫描系统, 通过六个小时的夜间观测获得对流层以上至平流层底20 km的水汽探测[6]。 目前拉曼激光雷达水汽探测系统, 发射波长为532 nm绿光或355 nm紫外光, 进行白天水汽探测时受限于白天太阳背景光的影响, 多用于夜间测量。 国内外目前对波长在220~280 nm的紫外波段即日盲区研究较少[7], 该波段光波被大气层中的臭氧层几乎完全吸收, 白天太阳背景辐射几乎衰减为零, 白天利用该波段探测不受太阳背景光影响; 且拉曼散射强度与波长的四次方成反比, 短波长激励在白天水汽探测中更具优势。 因此, 为实现全天时拉曼激光雷达大气水汽探测, 日盲紫外波段拉曼激光雷达水汽探测系统的开发研究具有重要意义。
拉曼激光雷达水汽振动拉曼散射回波信号非常微弱, 在白天测量时会淹没在太阳背景光中, 为实现大气水汽的全天时测量, 本文设计开发一套日盲紫外波段拉曼激光雷达系统。 该系统选择日盲紫外波段266.0 nm作为拉曼激光雷达系统的激励波长, 采用镀高增益介质膜的牛顿式望远镜作为接收器, 同时利用二向色镜和超窄带干涉滤光片设计高效率的高光谱分光系统, 实现了大气氮气和水汽振动拉曼散射回波信号的精细提取以及对米瑞利弹性散射信号的高抑制比。 计算仿真结果表明, 臭氧对日盲紫外域的吸收作用使部分回波信号衰减, 对日盲紫外域拉曼激光雷达探测距离存在一定的影响。 而系统信噪比计算结果表明, 设计的日盲紫外域拉曼激光雷达系统可实现白天3.5 km大气水汽的探测, 验证了日盲区白天近场水汽探测是有效可行的。
拉曼激光雷达探测技术利用拉曼散射频移只与散射分子成分有关, 不同的物质具有不同的拉曼频移的原理, 由此反演得到各种大气气象和环境相关的参数。 根据入射激光中心波长λ 0与拉曼频移Δ ν 的关系, 拉曼后向散射截面与λ 0的四次方成反比[8]的关系, 可得到氧气、 氮气、 水汽的拉曼回波中心波长及后向散射截面值dσ 266(π )/dΩ 见表1。
| 表1 氧气、 氮气、 水汽的振动拉曼频移、拉曼中心波长及后向散射截面 Table 1 Raman frequency shift, Raman wavelength and cross section of O2, N2, H2O |
水汽的探测一般利用振动拉曼斯托克斯光[9]。 大气中氮气相对稳定, 系统利用氮气和水汽分子的振动拉曼散射信号反演水汽的含量, 白天探测时氧气、 氮气、 水汽振动拉曼激光雷达回波信号如下
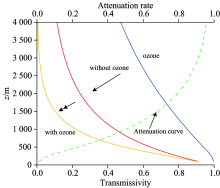
式中z为探测距离, P0是激光器的初始功率, c是光速, τ 是激光脉冲宽度, A是望远镜的接收面积, η 是整体激光雷达系统在激光波长处的效率, Ok(z)/z2是激光雷达几何因子。 β k(z)是距离z处的拉曼后向散射系数, Nk(z)是气体分子数密度。 Eb(λ )为拉曼激光雷达信号的太阳背景辐射噪声成分, 因发射波长处于日盲紫外域, 该背景噪声可近似为0。 Tk(z)是大气透过率衰减项, 考虑对流层中的臭氧对日盲区紫外域的吸收, 公式表示如下
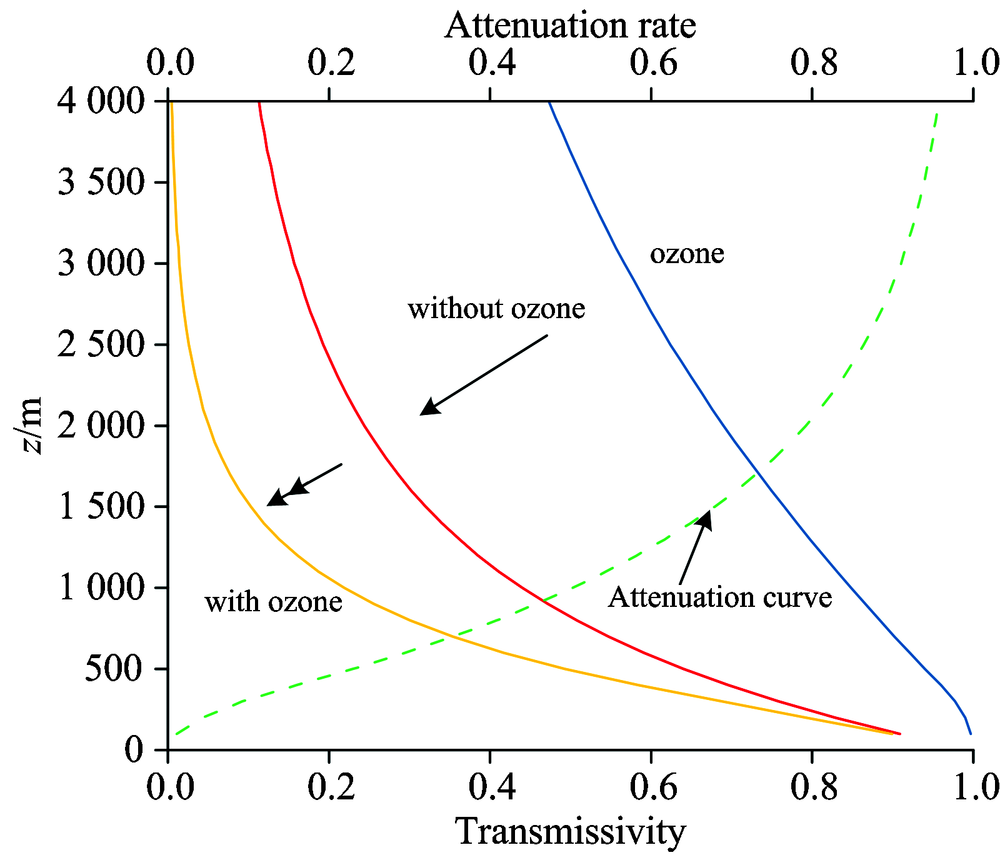 | 图1 氮气通道大气透过率曲线Fig.1 Curves of the N2 channel atmospheric transmissivity |
由拉曼激光雷达式(1)和式(2)及表1中气体分子的后向散射截面数据, 可反演水汽混合比
式中, Δ τ 为无臭氧吸收时的大气透过率修正项, Δ
本文所设计的日盲紫外域水汽探测拉曼激光雷达系统原理图如图2所示。 该系统采用Nd∶ YAG激光器四倍频(FHG)输出作为发射光源, 激励波长为266.0 nm, 重复频率10 Hz, 激光能量150 mJ; 激光脉冲经过5倍准直镜扩束后, 经45° 放置的反射镜射向大气中; 大气回波信号经直径为400 mm、 组合焦距为3 m的望远镜接收; 耦合进入口径为0.8 mm多模光纤, 经透镜准直后进入由二向色镜和超窄带滤光片组成的分光系统中, 实现4个通道的精细分离。 回波信号经二向色镜DM1(dichroic mirrors)反射, 再经中心波长266.0nm带宽1 nm的窄带滤光片IF1(narrow-band interference filters)滤波后的通道, 作为米-瑞利探测通道1; 透射过DM1的光被二向色镜DM2反射, 再经中心波长277.5 nm带宽1 nm窄带滤光片IF2滤波, 作为拉曼氧气探测通道2; 透射过DM2的光被二向色镜DM3反射, 再经中心波长283.6 nm带宽1 nm的窄带滤光片IF3滤波, 作为拉曼氮气探测通道3; 透射过DM3的光, 再经中心波长294.6 nm带宽0.5 nm窄带滤光片IF3滤波, 作为拉曼水汽探测通道4。 各通道回波信号由光电倍增管(PMT)接收探测, 经过数据采集记录仪(LICEL Lidar Transient Recorder), 最终送入计算机进行数据反演处理。 通道3和4相结合用于反演大气水汽密度廓线, 通道2和3相结合用于反演大气臭氧浓度廓线。
 | 图2 大气水汽探测拉曼激光雷达系统原理图Fig.2 Schematic of the Water Detection Raman lidar system |
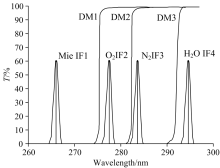
在分光系统中, 二向色镜和干涉滤光片的透射特性曲线如图3所示。 DM1, DM2和DM3具有高光谱分辨和高性能的特点, 二向色镜DM1对波长小于270 nm的光具有极高的反射率(> 99%), 对波长大于273 nm的光具有很高的透射率(> 90%), 窄带滤光片IF1的带外抑制比OD (optical density)为3, 带宽1 nm, 峰值透过率为60%, 通道1可提取266 nm处的米-瑞利散射信号, 有效滤除杂散光等。 二向色镜DM2对波长小于279 nm的光具有极高的反射率(> 99%), 对波长大于281 nm的光具有很高的透射率(> 90%), 窄带滤光片IF2的带外抑制比OD为7, 带宽1 nm, 峰值透过率为60%, 通道2可高效精细提取氧气的振动拉曼散射信号, 并高效抑制米-瑞利散射信号达到7个数量级以上。 二向色镜DM3对波长小于290 nm的光具有极高的反射率(> 99%), 对波长大于293 nm的光具有很高的透射率(> 90%), 窄带滤光片IF3的带外抑制比OD为7, 带宽1 nm, 峰值透过率为60%, 通道3可高效精细提取氮气的振动拉曼散射信号, 并高效抑制米-瑞利散射信号达到7个数量级以上。 透射到二向色镜DM3的光再经过窄带宽滤光片IF4, 其带外抑制率OD为7, 峰值透过率为60%, 可高效精细提取水汽振动拉曼散射信号, 并高效抑制米-瑞利散射信号达到7个数量级以上。 日盲紫外域拉曼激光雷达系统参数如表2所示。
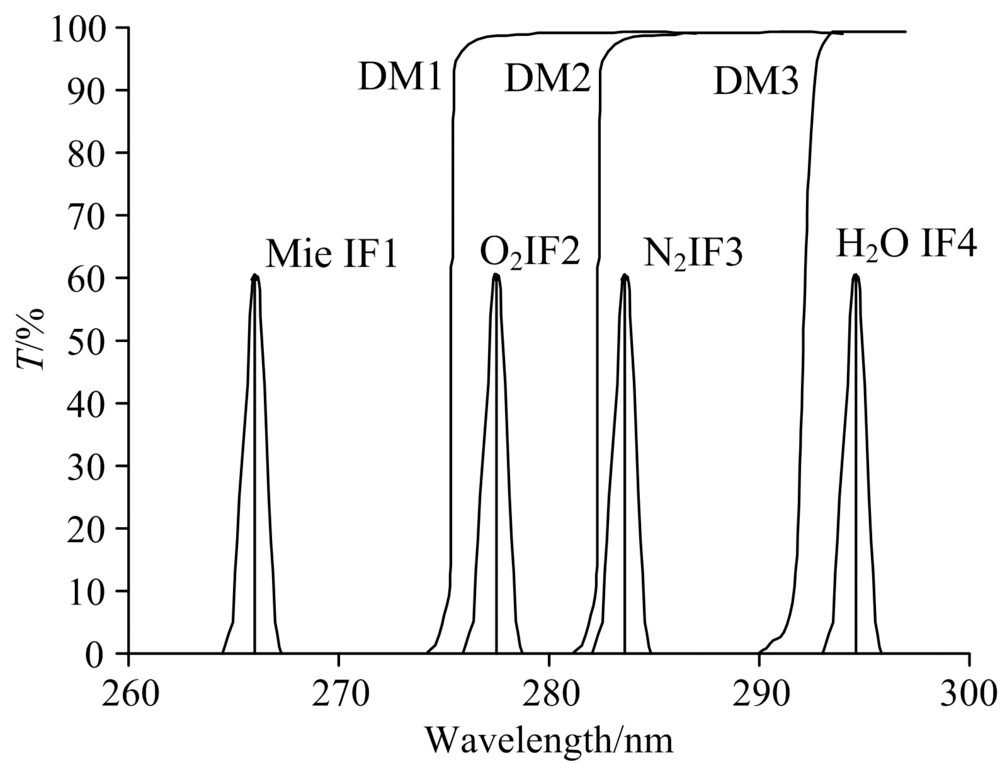 | 图3 二向色镜和干涉滤光片的透射特性曲线Fig.3 Transmittance curves of DMs and IFs |
| 表2 拉曼激光雷达系统参数表 Table 2 Specification parameters of the Raman lidar |
本文采用光子计数的形式对各个通道的信噪比SNR(Signal to noise ratio)进行计算[11], 表达式如下
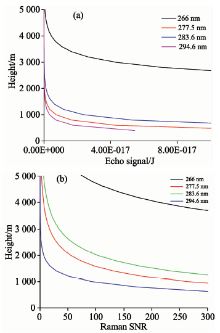
式中, ni是光电检测器接收的回波信号光子数; N是发射激光累积脉冲数; ne是通道中透过的米-瑞利后向散射信号; ns是通道中的太阳背景光的辐射强度; nI是光电探测器的暗电流。 根据式(5)及表2的系统参数, 利用美国标准大气模型中的大气分子散射模型及拉曼激光雷达探测原理公式, 取系统的采样间隔为80 ns, 累计平均脉冲数为36 000, 对日盲紫外域拉曼激光雷达系统信噪比进行仿真设计。 计算得到白天各探测通道的散射回波信号强度随高度的分布情况如图4(a), 及日盲紫外域拉曼激光雷达测量系统信噪比如图4(b)所示。
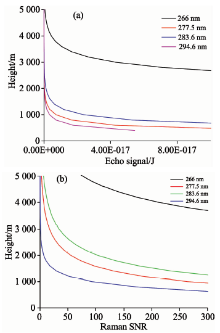 | 图4 (a)白天各探测通道拉曼回波信号强度分布; (b)白天拉曼探测系统仿真信噪比Fig.4 (a) Intensity distributions of Raman scattering echo signals in the daytime; (b) Simulation Simulated signal to noise ratio for Water Vapor Measurement in the daytime |
从图4中可以看出, 在白天探测情况下, SNR为10时, 氧气、 氮气拉曼回波信号探测范围可达到4.5 km, 水汽拉曼回波信号可达到3.5 km。 由此可见, 日盲紫外域大气水汽探测拉曼激光雷达系统可实现白天近场大气水汽的有效探测。
3.2.1 臭氧等气体对系统信噪比的影响
大气中的臭氧、 二氧化氮、 二氧化硫等气体对日盲紫外域短波长具有一定的吸收作用构成了大气透过率的衰减项, 即
此时, 日盲紫外域总的大气透过率如式(7)
式中Nh(z)为大气中臭氧、 二氧化氮、 二氧化硫的浓度, σ (z, λ )为臭氧、 二氧化氮、 二氧化硫吸收截面。 在常温下, 氧气、 氮气、 水汽三个拉曼通道对臭氧、 二氧化氮、 二氧化硫等气体的吸收截面近似值如表3所示[11], 一般情况下, 二氧化硫、 二氧化氮在大气中的浓度为0~0.02 mg· L-1, (1~4.5)× 10-3 mg· L-1, 美国大气标准模型下的臭氧的浓度如图5(a)所示。
| 表3 臭氧、 二氧化硫、 二氧化氮对氧气、 氮气、 水汽的拉曼中心波长处的吸收截面 Table 3 O3, SO2, NO2 absorption cross section of O2, N2, H2O |
 | 图5 (a)美国标准大气下的臭氧浓度; (b)SNRMie-Raylie含臭氧与不含臭氧的仿真结果对比Fig.5 (a) US Stand Model Concentration of ozone molecule; (b) The comparison of simulation results with and without ozone |
由上述数据及公式计算得到大气中臭氧对日盲紫外域波段拉曼雷达水汽探测系统信噪比的影响可达到80%以上, 二氧化硫对系统的影响可达到2%, 由于二氧化氮含量较少且吸收截面很小对系统信噪比的影响可忽略不计。 进行系统信噪比仿真时, 以米-瑞利通道为例, 大气透过率中含臭氧衰减项与不含臭氧衰减项的系统信噪比仿真结果对比如图5(b)所示, 两者相差非常大。 因此, 实际探测中加入氧气拉曼通道反演出臭氧浓度, 修正臭氧对发射波长、 各通道拉曼散射波长的吸收; 二氧化硫对系统测量精度带来的影响在系统误差分析时进行修正。
3.2.2 太阳背景噪声对系统信噪比的影响
日盲紫外域拉曼激光雷达水汽探测系统接收到的太阳背景辐射能量ns由式(8)来表示[12]。
式中K为系统常数, Sb(λ )为太阳背景辐射照度, θ 为接收望远镜的视场角, Ar是望远镜接收面积, Δ λ 为光谱透射窗口。 根据ASTMG173标准太阳光谱辐照度分布数据[12], 得到在AM(air mass)1.5条件下不同波长处的法向直接日射辐照度Sb(λ )如表4所示。
| 表4 标准太阳能光谱分布数据: 法向直接日射辐照度(AM1.5) Table 4 The standard solar irradiance: Direct Circumsolar(AM1.5) |
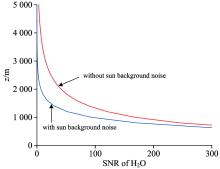
从表4可以看出氮气、 水汽通道仍有少量太阳背景噪声, 代入式(8)计算得日盲紫外域拉曼激光雷达水汽探测系统接收到的太阳背景辐射能量氮气通道近似为0, 水汽通道约为3.75× 10-18 J。 图6为白天测量时太阳背景辐射噪声对水汽通道信噪比的影响, 假设水汽通道太阳背景噪声为0, 当SNR为10时, 此时探测高度达到4.5 km, 而实际存在少量太阳背景噪声情况下, 当SNR为10时, 探测高度约为3.5 km, 而实际探测中可通过多次减去背景噪声的方式进一步降低太阳背景噪声, 则白天实际探测高度可达到3.5 km, 进而能有效完成白天大气近场水汽探测。
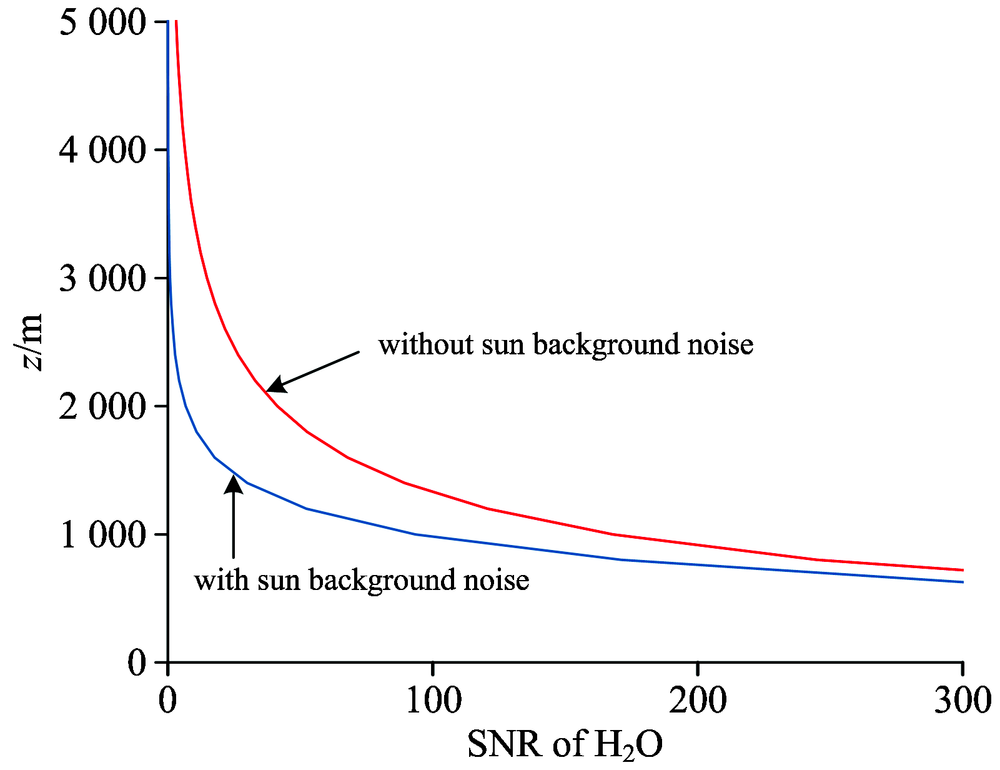 | 图6 白天测量时太阳背景噪声对水汽通道信噪比的影响Fig.6 The impact of the sun background noise on the SNR of the water vapor channel in the daylight measurement |
3.2.3 系统参数选取的优化
在一定测量范围内, 激光发射能量越大, 回波光子数越多, 但由于激光回波能量随距离衰减的特性, 这种影响10 km以上就不明显, 因此过大的激光发射能量并不能显著提高光子数且会增加系统成本, 本文选择四倍频输出266.0 nm发射波长下激光能量为150 mJ重复频率10 Hz的SGR-20型号Nd∶ YAG大功率激光器。 在一定测量范围内, 望远镜接收面积越大, 回波光子数越多, 但由于激光回波能量随距离衰减的特性, 大于5 km以上这种影响不明显, 因此本文选择望远镜口径400 mm焦距3 m即可满足系统要求。 光电探测器应尽量选取在四个通道波长处量子效率较大的光电倍增管, 本文选择在紫外短波区量子效率可达到30%的R3896光电倍增管。 考虑到强于拉曼回波信号4个量级左右的米-瑞利信号影响、 其他气体拉曼散射光影响、 发射激光中夹杂的532 nm等激光激发的拉曼通道散射光的影响、 少量太阳背景光的影响, 综合滤光片透过率和OD之间的反比关系, 选取OD为7峰值透过率为60%的窄带干涉滤波片对弹性散射信号完成高效抑制; 由于氮气氧气通道谱线较为接近, 选择带宽为1 nm的窄带干涉滤波片进行氮气氧气等通道的精细分离。 滤光片中心波长与入射角θ (入射光线与光轴的夹角)之间存在如下关系[13]
式中, λ k为光束平行入射时的中心波长, n是滤光片的有效折射率。 实际中θ 为0° ~1.5° , 探测时应考虑该角度带来的误差, 对系统测量精度进行修正。
采用266.0 nm激光作为水汽拉曼激光雷达系统的发射波长, 设计了一套新型的日盲紫外域水汽探测拉曼激光雷达系统, 详细阐述了系统的工作原理, 主要构成和技术参数。 通过雷达回波信号和系统信噪比的仿真得出, 在白天探测情况下, 由于水汽浓度仅按标准大气浓度的2%远小于氮气浓度, 水汽拉曼散射回波信号强度随距离的增高越来越低于氮气通道; SNR为10时, 根据标准太阳光谱辐照度分布数据, 考虑水汽通道少量太阳背景噪声时, 水汽探测高度可达到3.5 km, 无太阳背景光时, 水汽拉曼回波信号探测范围可达到4.5 km, 实际探测系统可进一步通过算法降低太阳背景噪声, 但受限于系统光学效率的影响会比仿真结果略有降低。 考虑对紫外区敏感的大气气体分子臭氧、 二氧化硫、 二氧化氮对系统探测的影响, 对它们造成的大气透过率的衰减进行计算分析可知, 臭氧对大气透过率的衰减, 对拉曼水汽探测的信噪比、 探测高度和精度均产生影响, 实际进行水汽探测时, 可利用N2和O2通道反演出臭氧浓度廓线, 修正臭氧对发射波长、 各通道拉曼散射波长的吸收, 提升系统的探测能力和探测精度; 二氧化硫和二氧化氮的吸收对系统影响很小, 实际测量时应进行误差修正进一步提高探测精度。 相较于355或532 nm拉曼雷达探测系统白天水汽探测时, 微弱的振动拉曼信号淹没在强烈的太阳背景光下, 日盲紫外域拉曼雷达探测系统白天探测时, 虽水汽通道略有太阳背景噪声, 经分析, 该系统可有效完成白天近场水汽探测。 根据系统的仿真结果, 升级优化了系统结构参数设计, 为后续水汽的实际反演提供高精度分离高弹性抑制比的分光系统和可靠的系统信噪比数据分析, 使得日盲紫外域拉曼水汽探测系统白日大气近场实际探测相对误差小于15%。 以上计算与分析验证了利用日盲区可有效探测白天大气近场水汽分布, 实现水汽全天时测量。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|