


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于分光光度法的海水原位硅酸盐微芯片分析传感器的研制
[曹煊1, 2  , 张述伟
, 张述伟1, 2 , 褚东志1, 2 , 吴宁1, 2 , 马海宽1, 2 , 马然1, 2 ]
, 张述伟|
|


作者简介: 曹煊, 1980年生, 山东省科学院海洋仪器仪表研究所副研究员 e-mail: cx@sdioi.com
基于酸性条件下硅酸盐与钼酸铵反应生成硅钼黄后被还原成硅钼蓝的原理, 借助微流控芯片平台, 建立基于连续流动-分光光度法快速测定海水硅酸盐的分析传感器, 传感器测定周期约为300 s, 采用双光程方式拓展测量范围, 线性测量范围可达0~400 μmol·L-1, 双光程的检出限分别为45.1 nmol·L-1和1.6 μmol·L-1; 当海水盐度大于15时, 传感器测量准确度和稳定性基本不受盐度影响, 且实际海水加标回收率在98.1%~104.0%之间。 2015年11月在胶州湾开展了20个站点海试和同步比对试验, 结果显示, 该系统具有准确度高、 简单、 集成度高、 水样消耗少、 抗干扰能力强等优点, 可用于海水原位硅酸盐的分析。
A new Microfluidic continuous flow analysis sensor is established for the determination of soluble silicate in seawater based on the reaction of silicate with ammonium molybdate to form a yellow silicomolybdate complex, and further reduction to silicomoIybdenum blue by ascorbic acid. Theanalyzing cycle of the sensor is about 300 s, Double optical absorbance path method is adopted in this sensor to expand the measuring range, and the linear range of the sensor reaches 0~400 mol·L-1 with limit of detection of each absorbance cell were 45.1 nmol·L-1 and 1.6 μmol·L-1 respectively. There are no evident effects on the performance of determination of this sensor when samples’ salinity is above 15, and the actual water the recovery rate is between 98.1%~104.0%. In November 2015, this sensor was deployed in a research vessel for a sea trail in Jiaozhou Bay involving 20 sites, the data acquired from the sensor were compared with those from sampling then by lab analyzing. The results obtained in situ coincide with those from lab analyzing, and indicating This sensor has the advantages of high accuracy, simple and high integration, water consumption, and strong anti-interference ability, and suitable for in situ silicate monitoring.
海水中的硅酸盐是生物生长所必需的营养盐之一, 是构成硅藻、 放射虫和有孔虫等海洋生物有机体的重要组分, 在海洋生态系统中起着至关重要的作用。 硅酸盐不足会导致初级生产力降低, 而过量的硅酸盐则易引起硅藻的过度生长, 进而导致赤潮等灾害的发生, 因此监测海水硅酸盐对海洋生物资源开发、 海洋生态环境保护有着重要的意义。
海水硅酸盐的仲裁方法是依据《海洋监测规范》(17378.4— 2007)中规定的硅钼黄和硅钼蓝两种方法, 其中硅钼黄灵敏度较差, 且易受盐度干扰, 不适合低浓度分析; 硅钼蓝法灵敏度较高, 选择性好, 目前海洋业务单位多采用硅钼蓝法进行海水硅酸盐分析, 但该方法耗时长、 操作繁琐, 较难实现现场连续分析。 随着流体分析技术的不断进步, 许多分析方法被用于海水营养盐的分析, 包括流动注射法[1, 2, 3]、 顺序注射法[4, 5]、 连续流动法[6]、 停留分析法[7]等, 这些方法突破了传统操作须达到物理与化学平衡的观念, 借助精确的时间控制, 在非平衡状态下进行分析, 大大缩短了分析时间, 其中多数方法可用于硅酸盐的在线连续分析。
近年来, 随着微纳技术的不断发展, 微流控芯片技术整合流体分析系统成为一个新的发展趋势[8, 9]。 借助微流控芯片的高集成度和高传质传热等特点, 研发新型的海水营养盐分析系统或传感器的条件已基本成熟。 本研究以微流控芯片为载体, 采用经典的硅钼蓝分光光度法, 设计了适用于海水硅酸盐原位连续分析的分析传感器, 并在胶州湾海域开展应用, 取得了令人满意的结果。
Protomat S61 高精度电路板雕刻机(LPKF, 德国), 紫外曝光机(LPKF, 德国), MultiPress S液压层压机(LPKF, 德国)用于芯片加工; 42系列17_2212改进型步进电机(鼎智, 中国)自制步进电机配4支2 mL亚克力注射器(自制)和LVM10R1微型电磁阀(SMC, 日本)用于控制微流体流动; 810 nm发光二极管(Avago Technologies, 美国)作为检测光源, 硅光电二极管(TAOS, 美国)作为检测器。 3.0 mm GS 7C83染色聚甲基丙烯酸甲酯(PMMA)光学基片(Plexiglas GS, 德国)作为芯片基材; Norland 68光学胶(Norland, 美国)用于封接光学器件。
在实验中所有的溶液均由超声脱气后的18.2 MΩ 超纯水(由Milli-Q超纯水系统制得)配制; 硅标准溶液(1 L中含100 mg SiO2, 国家标准物质研究中心); 酸性钼酸铵溶液: 将11.9 g钼酸铵(Aldrich, Sigma-Aldrich, 德国)溶于250 mL水中, 15 mL浓硫酸(优级纯, Merck, 德国)溶于150 mL水中, 冷却后两种溶液混匀。 掩蔽剂: 将26.3 g柠檬酸(Fluka, Sigma-Aldrich, 德国)溶于250 mL去离子水中, 再加入0.2 g酒石酸锑钾(Fluka, Sigma-Aldrich, 德国)充分溶解, 还原剂: 将10.0 g抗坏血酸(Fluka, Sigma-Aldrich, 德国)溶于200 mL去离子水中。 上述配置完成后各自加入1 mL氯仿, 使用前4 ℃冷藏避光保存, 有效期30 d。
本研究在《海洋监测规范》(17378.4— 2007)所述的硅钼蓝法基础上进行优化[图1(a)], 使之更适合在线分析的特点。 在酸性条件下, 海水中硅酸盐与钼酸铵混合反应生成黄色的硅钼杂多酸及硅钼黄, 以柠檬酸和酒石酸锑钾为掩蔽剂去除海水中磷和砷等物质的干扰。 研究显示[10], 相较于国标法中的草酸, 柠檬酸和酒石酸锑钾具有掩蔽效果好, 不破坏硅钼黄且速度快的优点, 同时酒石酸锑钾也可对后续还原反应起到催化剂作用。 硅钼黄经掩蔽后与抗坏血酸反应生成硅钼蓝, 该物质在812 nm处有最大吸光度, 且其吸光度与浓度之间符合朗伯-比尔定律。
 | 图1 芯片设计及分析流程 PD: 光电二极管; Syr: 注射器; LED: 发光二极管; Abs. Cell Ref: 参比流通池; Abs. Cell Meas: 检测流通池; LT: 全反射光传输管Fig.1 Microfluidic chip design and analysis procedure PD: Photodiode; Syr: Syringe; LED: Light-emitting diode; Abs. Cell Ref: Adsorption cell reference; Abs. Cell Meas: Adsorption cell measurement, LT: Light tube |
微芯片采用Protomat S61 高精度电路板雕刻机微铣刻制成[见图1(b)], 芯片基材为深棕色染色聚甲基丙烯酸甲酯(PMMA)光学基片, 尺寸为100 mm× 100 mm× 3.0 mm, 采用染色PMMA基材的目的是降低环境光以及参比光路的光源对检测的影响。 芯片采用氯仿溶剂辅助热压键合的方式, 前期研究显示[11]该方式可有效降低微通道表面粗糙度, 提高光学分析精度。 芯片上设计了三个光学流通检测池, 其中两个25 mm长的检测池用于硅酸盐检测和参比, 一个5 mm长的检测池用于高浓度硅酸盐检测。 三组810 nm的LED和光电二极管作为光源和检测器, 直接以光学胶固定于光学检测池两端, 实现吸光度检测。 考虑到5 mm检测池光程较短, 光源会对检测器带来较大的影响, 因而在检测池和光源之间添加一段7 mm的微通道, 内灌入高折射率的光学胶(Norland Optical Adhesive 68)以形成具有全反射效应的光传输管(Light Tube)[12], 用以增加光程, 降低强光LED对检测器的冲击。 同时, 芯片上设计了两个混合蛇形混合反应区, 长度分别为936.5和684.1 mm, 芯片上除检测池通道为400 μ m的正方形槽外, 其他通道均为250 μ m的正方形槽。 芯片上液体总死体积约123.7 μ L。
传感器[图2(a)和(b)]由四个部分构成, 包括流体驱动部分、 分析芯片、 相关控制分析电路以及传感器外设。 其中流体驱动部分由注射泵和电磁阀组组成, 注射泵采用直线步进电机配4只2 mL的PMMA注射器形式, 以两只近红外限位开关预先设定好注射器步进距离, 保证注射器在固定距离内往复运动, 稳定输送流体进入芯片。 流体进入芯片后, 由电磁阀组控制流体通断及转向, 电磁阀组由13只微型电磁阀(SMC公司, 日本)组成, 注射器和电磁阀采用螺纹和O型圈形式与芯片连接以保证水密性, 每个微电磁阀死体积约20 μ L, 因而整个芯片分析系统的总体积约383.7 μ L。 控制和分析电路系统包括中央数据处理模块、 电源模块、 步进电机控制驱动模块、 数据采集模块、 数据处理模块、 存储模块等部分构成。 中央处理器采用TI公司STM32芯片; 电源模块兼顾自容式供电和外部供电两种工作模式; 步进电机驱动模块采用鼎智DS-5045-003型驱动器, 实现电机往复运动; 数据采集模块主要完成光电二极管信号的采集、 转换、 放大, 采用24位德州仪器ADS1675作为A/D转换芯片; 数据处理模块对采集的信号进行实时量化、 通过积分和平均计算, 根据工作曲线关系, 进行实时输出处理数据; 存储模块采用2 GB的SD卡实现数据存储, 并设有容错程序文件, 保证传感器在意外断电时数据不丢失或损坏。 整个分析系统安装在一个直径15 cm, 长45 cm的PVC柱状桶中[图2(b)], 采用O型圈轴向密封, 同时传感器配有蠕动泵和0.45 μ m囊式过滤器的过滤装置以及分析所需的各种试剂袋。
 | 图2 传感器结构和实物图Fig.2 Construction model and real product of silicate sensor |
传感器分析流程主要包括以下四步: (1)进样, 注射泵从抽取过滤后的海水样品并注入分析芯片中; (2)一次混合反应, 样品与酸性钼酸铵混合进入第一混合区反应。 形成硅钼黄; (3)二次混合反应, 硅钼黄形成后, 与掩蔽剂和抗坏血酸混合进入第二混合区显色; (4)测量吸光度, 计算硅酸盐浓度。 样品、 空白或标准物质进入芯片时要先测定参比吸光度, 用以后续校正样品基体误差; 样品与试剂以1∶ 1比例混合, 以80 μ L· min-1的流速流过芯片系统, 为保证混合反应充分, 在样品进入一个混合区后, 关闭混合区后端电磁阀, 同时控制注射器来回抽动数次, 使混合区的两种液体做往复运动以提高混合反应效率, 考虑到硅钼黄反应速度较慢, 第一次混合后停留150 s以增强显色效果。 每次分析样品前后均需先测定空白样(人工海水)以确定仪器状态, 同时起到清洗系统的作用。 每个样品整个分析周期约(含分析前后空白样)300 s。 此外, 传感器原位测量时载带高低浓度的两种标准溶液(5和200 μ mol· L-1)作为内标, 测量时每间隔15个样品左右分别自动测量一次, 以校正测量的准确度。
海水中可溶态硅的平均浓度约为36 μ mol· L-1, 且含量变化很大。 在硅藻类浮游植物繁盛季节, 由于浮游植物大量摄取, 海水中硅酸盐浓度大大降低可达0.13 μ mol· L-1 [13], 而在大洋深水中其浓度约100~200 μ mol· L-1, 如此大的浓度变化范围大大增加了硅酸盐现场分析的难度。 为兼顾高低浓度分析, 传感器分析芯片上采用25和5 mm两个测量光程分别实现高低浓度硅酸盐的分析, 工作曲线见图3(a)和(b)。 对于25 mm光程的检测池, 其在0~90 μ mol· L-1的范围内有明显的浓度梯度, 但最佳线性测量范围为0~40 μ mol· L-1, 其工作曲线回归方程为A=0.203cSi+0.011 2(n=7, R2=0.998 4); 而对于5 mm光程的检测池, 其在0~800 μ mol· L-1的范围内有明显的浓度梯度, 在0~400 μ mol· L-1范围内呈线性, 其工作曲线回归方程为A=0.002 3cSi+0.017 1(n=7, R2=0.998 5)。 为保证分析质量, 传感器在程序中设定当浓度低于30 μ mol· L-1时以25 mm光程测量结果作为输出结果, 而高于30 μ mol· L-1时采用5 mm光程测量结果, 总体线性测量范围为0~400 μ mol· L-1。
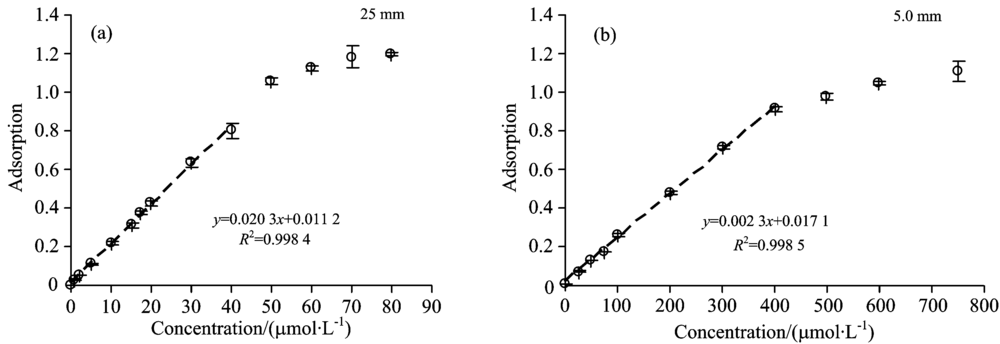 | 图3 传感器工作曲线 (a): 25 mm光程; (b): 5 mm光程Fig.3 Calibration of sensor (a): 25 mm optical path length; (b): 5 mm optical path length |
连续测定硅酸盐浓度为7.7和132.1 μ mol· L-1(以《海洋检测规范》硅钼蓝法测定)海水水样11次, 相对标准偏差(RSD%)分别为2.1%和1.4%, 显示了本传感器重复性良好, 精密度高。
以制备的无硅海水为空白样品, 连续测定11次, 以3倍空白样品标准偏差除以工作曲线斜率, 得到传感器得检出限为45.1 nmol· L-1(25 mm光程)和1.6 μ mol· L-1(5 mm光程), 以15倍空白样品标准偏差除以工作曲线斜率, 得到传感器得定量限为225.5 nmol· L-1(25 mm光程)和8.0 μ mol· L-1(5 mm光程)。
研究显示[14], 采用硅钼蓝分析体系分析海水时主要干扰来自于磷酸盐(海水中砷酸盐含量很低, 可以忽略)和盐度。 其中磷酸盐干扰主要来自于磷酸盐与钼酸铵形成磷钼黄, 被抗坏血酸还原为磷钼蓝进而干扰硅钼蓝的检测, 本研究中加入柠檬酸和酒石酸锑钾作为掩蔽剂用以去除磷酸盐干扰; 而海水盐度变化对显色反应产生较大的影响, 海水中大量电解质的存在会加速β 型硅钼杂多酸(硅钼黄)向其同分异构体α 型硅钼杂多酸转化, 导致后续检测吸光度降低, 同时盐度也会在流动分析体系中产生Schlieren效应, 导致数据不稳定。 为此, 配置盐度为10, 15, 20, 30, 35, 40的10 μ mol· L-1的硅酸盐样品, 考察盐度对分析准确性的影响(图4), 结果显示对于本传感器当盐度大于15时吸光度基本稳定, 不会影响测定准确度和稳定性。
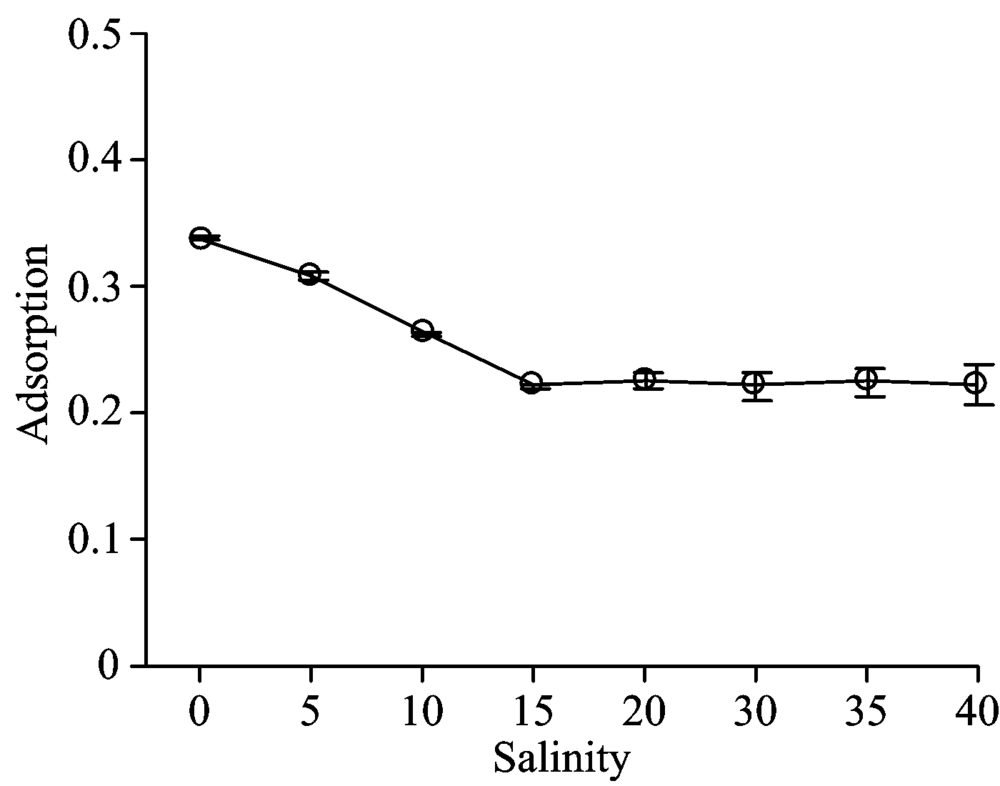 | 图4 海水盐度对传感器分析的影响Fig.4 Salinity effects on accuracy of sensor |
以采自青岛中苑码头(120° 18″ E, 36° 03' N)和浙江舟山半升洞码头(122° 19' E, 29° 56' N)的海水水样为基底, 加入浓度50%和100%的硅酸盐标准液进行加标试验(表1), 结果显示, 传感器对高低硅酸盐本底浓度样品的加标回收率均在98.1%~104.0%之间, 表明其准确度良好。
| 表1 实际水样测定与基底加标回收率试验(n=3) Table 1 Determination of seawater sample and recovery tests (n=3) |
2015年11月29日起, 研究组搭载渔船对胶州湾南端, 青岛胶南海域的20个站点进行走航式调查[站位和航线见图5(a)]。 期间采用自主研制的硅酸盐传感器, 配在线0.45 μ m过滤装置对每个站点的硅酸盐进行表层1米原位测量(测量三次, 以平均值计), 同时采集海水样品带回实验室按照《海洋监测规范》开展分析比对。 表2显示了20个站点海水中的硅酸盐含量及其与国标法比对情况, 由表可知在给定的20个站点间, 传感器获取数据与国标法测定值变化趋势一致, 利用t检验法对所得硅酸盐数据进行显著性检验, 取α =0.05, n=3, 查表的t(α , f)的临界值为2.776。 由于实验所得硅酸盐测试结果的t值均小于t(α , f)的临界值, 可见传感器得到的测量结果与国标法测量值相比无显著性差异。
 | 图5 海试航线及海试区域硅酸盐浓度分布图(μ g· L-1)Fig.5 Sea trial route and silicate distribution around sea trial area (μ g· L-1) |
| 表2 硅酸盐海试数据及比对(n=3, μ g· L-1) Table 2 Silicate data from sea trial and comparison with national standard method(n=3, μ g· L-1) |
就监测海域数据而言, 11月底胶州湾南端表层海水中硅酸盐的含量在32.2~69.1 μ g· L-1之间, 平均值为47.1 μ g· L-1。 最高值出现在前湾港区的ZY06站, 最低值出现在竹岔岛近海的HS06站, 平面分布[图5(b)]为近岸海域高于外海。
基于酸性条件下硅酸盐与钼酸铵反应生成硅钼黄后被还原成硅钼蓝的原理, 以微流控芯片为平台构建了适用于海水硅酸盐分析的传感器。 传感器一个分析周期仅需300 s, 远少于《海洋监测规范》界定方法的耗时(3 h), 同时具备现场、 原位、 连续分析的能力。 传感器采用双光路分析的方法实现了0~400 μ mol· L-1硅酸盐的宽范围线性测量, 最低检出限可达45.1 nmol· L-1, 同时方法精密度高, 对于7.7和132.1 μ mol· L-1海水样品11次测量的相对标准偏差(RSD%)分别为2.1%和1.4%, 且在盐度高于15时, 基本不受盐度干扰。 采用传感器对胶州湾20个站点水样进行走航式分析, 期间仪器无故障, 测定数据与国标法一致, 显示了良好的准确度和环境适应性。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|