



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
桂花酒中山梨酸钾拉曼表面增强预测模型在其他果酒中的传递
[杨宇 , 彭彦昆, 李永玉
, 彭彦昆, 李永玉* , 房晓倩, 翟晨, 王文秀, 郑晓春]
, 彭彦昆, 李永玉, 房晓倩, 翟晨, 王文秀, 郑晓春]
|
|


作者简介: 杨宇, 1993年生,中国农业大学工学院硕士研究生 e-mail: yangyu0227@126.com
自行搭建的拉曼光谱点扫描系统, 以柠檬酸钠还原法配制的SC银溶胶为表面增强剂, 建立了桂花酒中山梨酸钾的定量预测模型, 模型校正集决定系数(
Based on a self-built Raman scanning system and the SERS substrate named SC silver sol which was prepared with sodium citrate reduction method, a quantitative prediction model of potassium sorbate in osmanthus wine was established. The 34 osmanthus wine samples were divided into calibration set and validation set, and the potassium concentration prediction model was established by multiple linear regression method. The determination coefficient and the root mean square error of the calibration set were 0.978 9 and 0.070 3 g·kg-1 respectively, the determination coefficient and the root mean square error of the validation set were 0.934 and 0.165 7 g·kg-1 respectively. The quantitative prediction model of potassium sorbate in osmanthus wine as the main spectrum model and by using the DS algorithm and the PDS algorithm, discussed the model transfer method of potassium sorbateintwo different wines. The K/S algorithm was used to sort the Raman spectra of bayberry wine. The main spectrum correction matrix was composed of osmanthus wine samples which had the same concentration ascalibration matrix. 15 bayberry wine samples were prepared to verify the effect of the transfer model. The results of the DS algorithm showed that RP and RMSEP were 0.906 1 and 0.215 0 g·kg-1 respectively. The results of the PDS algorithm showed that RP and RMSEP were 0.905 5 and 0.225 g·kg-1 respectively. DS algorithm and PDS algorithm can be achieved with a small number of samples for effective model transfer, and the best samples of the two methods were 4 and 3 respectively. In addition, window width of 5 was the best choice of PDS algorithm. Prediction model of potassium sorbate in osmanthus wine was suitable for the quantitative prediction of potassium sorbate in red bayberry wine by DS algorithm or PDS algorithm. The DS algorithm and PDS algorithm can achieve the transfer of prediction model for potassium sorbate in different wines. Potassium sorbatein red bayberry wine can be predicted by the prediction model of osmanthus wine.
拉曼光谱技术越来越广泛应用于医药、 食品等品质安全检测领域。 通常利用被测物拉曼特征峰强与其浓度建立数学预测模型, 然后利用待测样品的光谱和已建模型来实现被测物的定量分析。 但在实际应用中通过大量样本实验所建模型, 常常会受到仪器[1]、 样品种类[2]、 检测环境等诸多因素影响, 改变任何条件预测误差就会增加。 针对以上问题, 有不少学者通过直接校正法(DS)、 斜率/偏差校正法(S/B)[3]、 分段直接校正法(PDS)[4]和典型相关分析法(CCA)[5]等手段, 对原有模型进行修正传递, 使得模型可以应用于新仪器、 新检测环境。 有研究利用标准正态变换(简称SNV)与PDS结合的方法实现了汽油在不同拉曼光谱仪之间的模型传递。 Olsen等[6]利用光谱预处理方法将同一拉曼光谱仪测量猪肉脂肪组织中碘值的模型成功转移到三年后的样本预测中。 但是, 针对同一被测物在不同物种间的模型修正传递方法研究相对较少, 且研究对象大多为近红外光谱模型, 尚未见拉曼光谱修正传递方法研究。
山梨酸钾常作为防腐剂在食品加工生产过程中使用。 食品添加剂使用标准(GB2760— 2014)中规定果酒中山梨酸钾最大使用量为0.6 g· kg-1。 表面增强拉曼光谱技术是基于拉曼散射效应并运用表面增强剂或表面增强基底来实现被测分子的痕量检测[7], 使山梨酸钾等微量成分在各类果酒中的快速定量检测成为可能。 然而, 因山梨酸钾在桂花酒、 杨梅酒等不同介质中与表面增强基底的紧密结合程度及振动模式不同, 会表现出不同的拉曼强度。 因此研究山梨酸钾预测模型在不同果酒间的修正传递方法, 使同一被测物预测模型在不同物种间进行传递, 扩大模型的应用范围, 具有重要实用意义。
本工作基于自行搭建的拉曼光谱点扫描系统, 以柠檬酸钠还原法配制的SC银溶胶为表面增强剂, 确定果酒中山梨酸钾拉曼特征位移, 建立一种桂花酒中山梨酸钾预测模型, 并探讨该山梨酸钾预测模型对其他果酒的修正传递方法, 旨在实现将表面增强拉曼的山梨酸钾预测模型, 通过修正传递后应用于其他果酒。
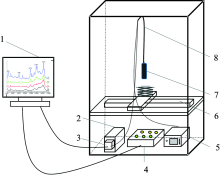
拉曼光谱检测系统: 实验室自行搭建的拉曼光谱点扫描系统如图1所示, 主要包括拉曼光谱仪(10785MM0350MS, Innovative Photonic Solutions)、 拉曼激光器(Raman Explorer 785, Headwall Photonics)、 CCD相机(Andor Newton DU920PBR-DD, Andor Technology)等, 共有1 024个连续有效拉曼位移探测点。
 | 图1 拉曼点扫描系统 1: 计算机; 2: 拉曼光谱仪; 3: CCD相机; 4: 步进电机; 5: 激光器; 6: 三维平移台; 7: 拉曼探头; 8: Y型光纤Fig.1 Raman point scanning system 1: Computer; 2: Raman spectrometer; 3: CCD camera; 4: Stepper motor; 5: Laser; 6: Three-dimensional translation stage; 7: Raman probe; 8: Y type fiber |
果酒样品: 市售桂花酒中添加山梨酸钾(纯度≥ 99%, 宁波王龙科技股份有限公司生产), 分别配制了山梨酸钾浓度范围为0.3~1.95 g· kg-1、 浓度梯度为0.05 g· kg-1的34个桂花酒样品; 相同方法用市售杨梅酒分别配制15个样品用于模型传递, 浓度是从桂花酒样品的浓度中均匀抽取15个进行配制, 浓度范围为0.4~1.95 g· kg-1。 另外, 在0.3~1.95 g· kg-1浓度范围内配制15个杨梅酒样品用于传递模型的验证。
银溶胶: 用Lee方法[8]自行配置SC银溶胶, 作为表面增强剂。
光谱采集及预处理: 用移液枪分别吸取果酒样品和银溶胶2.5 μ L, 先后滴落在铝箔纸上, 利用自行搭建的拉曼点检测系统在激光功率450 mW和曝光时间2 s条件下, 分别采集3次拉曼光谱曲线, 采集的光谱曲线进行平均作为样品的原始光谱。 原始光谱用Matlab 2013a软件进行S-G 5点平滑及Baseline(Automatic Whittaker Filter)荧光背景去除。
桂花酒中山梨酸钾预测模型建立: 将34个桂花酒样品分为校正集(26个)和验证集(8个), 用多元线性回归方法建立山梨酸钾浓度预测模型。
山梨酸钾预测模型传递方法: 通过K/S算法[9]将15个杨梅酒拉曼光谱校正矩阵进行排序, 从样品数为2起逐一增加样品数组成杨梅酒校正光谱矩阵, 相同浓度的桂花酒样品组成主光谱校正矩阵, 分别用DS算法[10]和PDS算法[11]进行模型传递。
模型传递验证方法: 从经过传递后的杨梅酒的验证集校正光谱中, 提取山梨酸钾拉曼特征峰强信息带入桂花酒山梨酸钾预测模型, 从而得到杨梅酒验证集中山梨酸钾含量预测值, 并将预测值与真实值进行对比分析。
山梨酸钾浓度均为1.75 g· kg-1的桂花酒和杨梅酒及山梨酸钾标准品的原始光谱曲线经S-G 5点平滑及Baseline荧光背景去除预处理后如图2所示, 两种果酒拉曼光谱曲线在1 161.8和1 648.4 cm-1两处都出现了非常明显的山梨酸钾拉曼特征峰。 因两种果酒成分及环境不同, 银溶胶中活性位点在不同果酒中选择的优先结合表面增强活性物质不同, 导致电荷转移效率和同一检测物的振动模式不同, 从而表现出相同浓度的山梨酸钾在两种果酒中的拉曼增强幅度的差异。 而利用SC银溶胶表面增强后桂花酒中山梨酸钾的拉曼特征信号明显高于相同浓度的杨梅酒, 故本研究选取桂花酒建立山梨酸钾含量预测模型作为传递主模型。
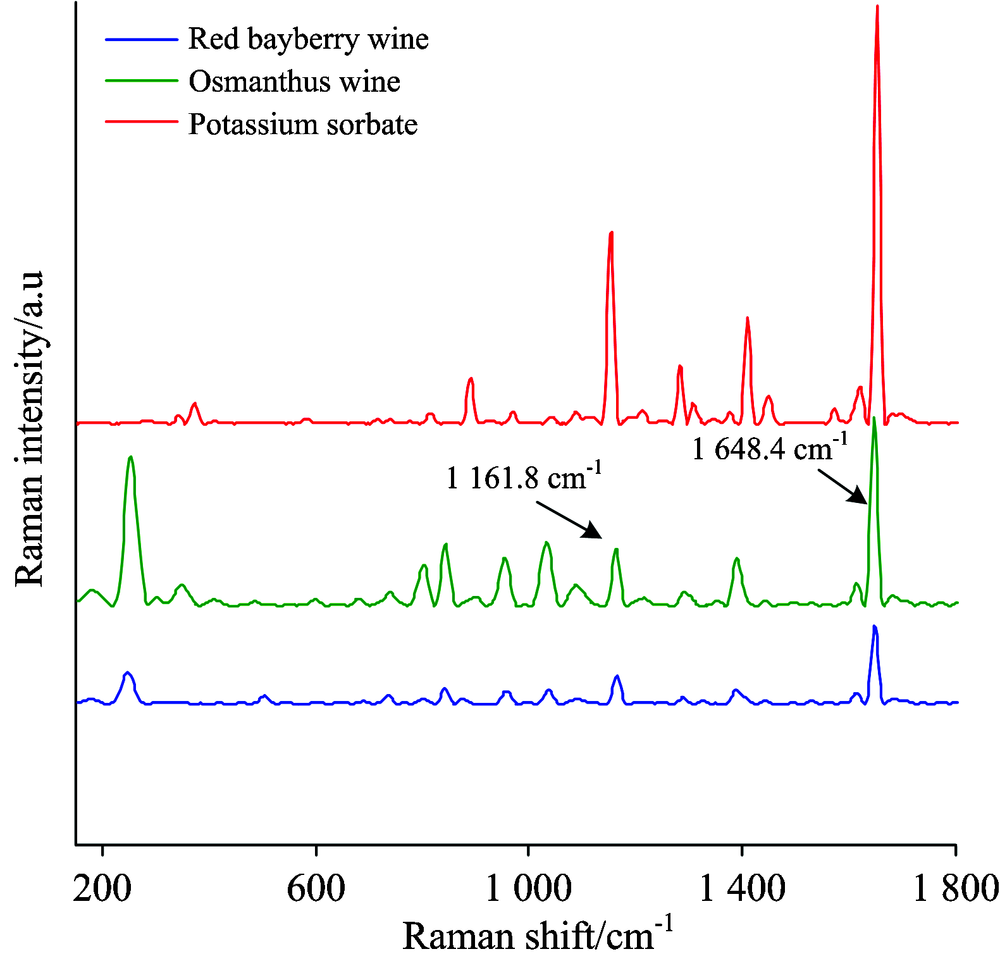 | 图2 山梨酸钾标准品拉曼预处理光谱及相同山梨酸钾含量的两种果酒表面增强拉曼预处理光谱Fig.2 Raman spectra of standard potassium sorbate and surface enhanced Raman spectra of two kinds of wine with the same content of potassium sorbate |
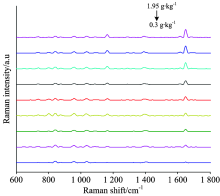
部分不同浓度梯度的桂花酒样品原始拉曼光谱曲线, 经S-G 5点平滑及Baseline荧光背景去除预处理后如图3所示, 可以看出, 随着山梨酸钾浓度的降低, 山梨酸钾拉曼特征位移处的峰强逐渐下降, 样品浓度与拉曼峰强呈现明显的正相关性。 将34个桂花酒样品分为校正集26个和验证集8个, 选取山梨酸钾两个主要拉曼特征位移1 161.8和1 648.4 cm-1处的拉曼特征峰强与桂花酒中山梨酸钾浓度进行了多元线性回归分析。 多元线性回归预测模型为Y=0.189 8+0.000 175X1+0.000 213X2, 其中Y为山梨酸钾含量预测值, X1和X2分别为山梨酸钾的拉曼特征位移1 161.8和1 648.4 cm-1处峰强。 如图4所示, 模型的校正集决定系数(
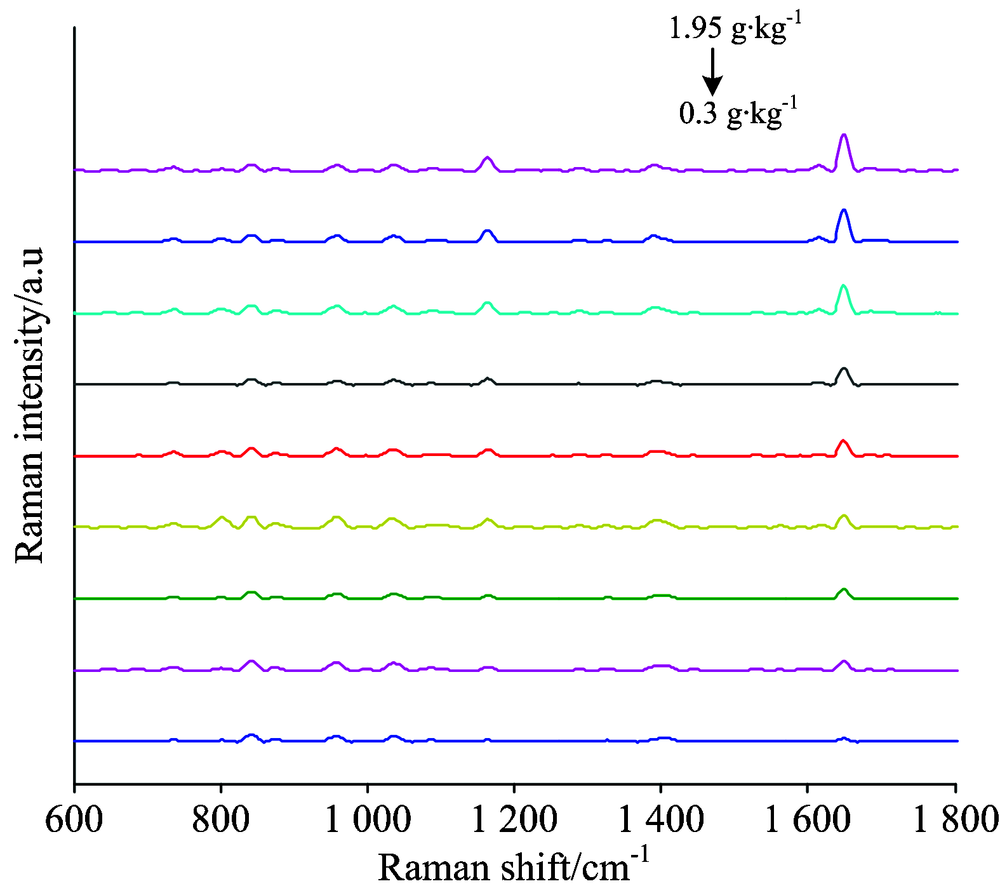 | 图3 部分不同浓度山梨酸钾桂花酒样品的SERS光谱曲线Fig.3 Surface-enhanced Raman spectra of osmanthus wine with different concentrations of potassium sorbate |
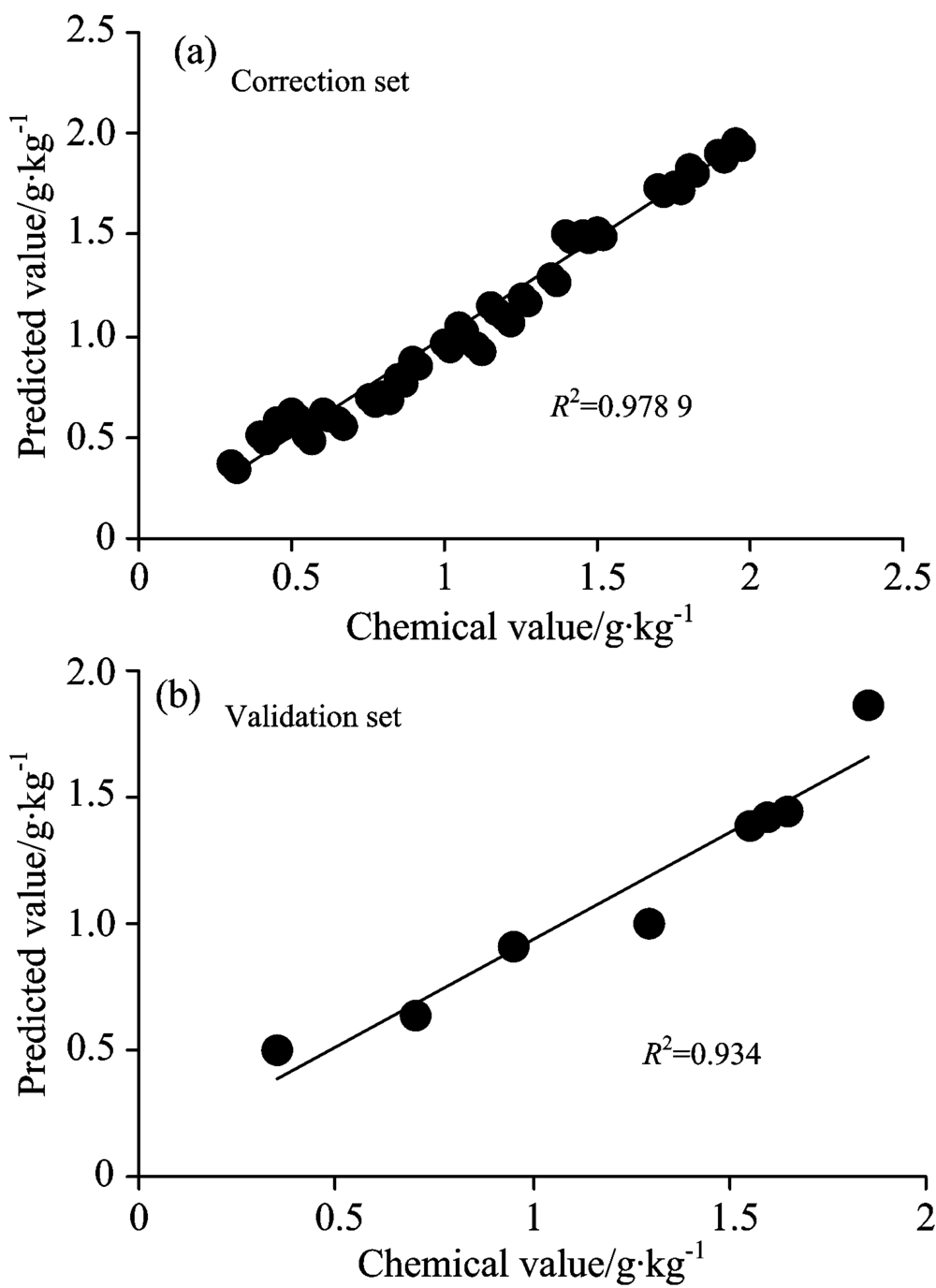 | 图4 桂花酒中山梨酸钾多元线性回归预测模型结果 (a): 校正集; (b): 验证集Fig.4 The results of multiple linear regression prediction model of potassium sorbate in osmanthus wine (a): Correction set; (b): Validation set |
2.2.1 基于DS算法向杨梅酒传递桂花酒主光谱模型
利用K/S算法[12]排序15个杨梅酒校正集样品, 选择排序为前2个的样品组成维数为2× 1 024(2为校正集样品数, 1 024为拉曼位移数)的杨梅酒校正光谱矩阵s2, 让其与维数为2× 1 024的相同浓度桂花酒光谱矩阵s1进行DS算法光谱校正, 求得1 024× 1 024阶转化矩阵F和1024× 1阶背景校正矩阵bs。 利用杨梅酒验证集15× 1 024矩阵X代入关系式X'=XF+i
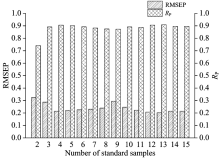
依次按顺序增加校正集样品数分别为2~15个的模型传递效果如图5所示。 当杨梅酒校正样品数量小于4个时, 随着校正集样品数的增加, 验证相关系数和均方根误差均有显著变化, 相关系数0.741 4上升到0.906 1, 均方根误差由0.323 7 g· kg-1下降到0.215 g· kg-1。 当杨梅酒校正样品数量大于4个时, 随着校正集样品数的增加, 验证相关系数和均方根误差变化趋于平稳, 相关系数和均方根误差分别在0.873 3~0.909 2和0.202 3~0.294 8 g· kg-1范围内浮动。 结果表明, 传递效果并不完全依赖样品数量, K/S算法可以有效提取有代表性的样品, 并且基于DS算法可以用4个杨梅酒样品实现向杨梅酒传递桂花酒主光谱模型。 当杨梅酒校正集样品数为4个时基于DS算法向杨梅酒传递桂花酒主光谱模型相关系数和均方根误差分别为0.906 1和0.215 g· kg-1。
 | 图5 DS算法在不同校正集样本个数下传递效果Fig.5 Effects of DS on the different number of samples from correction sets |
2.2.2 基于PDS算法向杨梅酒传递桂花酒主光谱模型
PDS算法与DS算法不同之处是需要确定合适的传递校正集样品个数和校正窗口宽度。 与DS算法相同, 利用K/S算法选出的校正集光谱进行两种果酒之间的光谱传递。 首先假设一个窗口宽度, 选出最佳的传递样品个数, 然后对最佳传递个数的校正集传递选择合适的窗口宽度, 使之达到最佳的传递效果。
首先确定桂花酒主光谱矩阵s1={s1ij, i=1, 2, …, m; j=1, 2, …, p}和杨梅酒从光谱矩阵s2={s2ij, i=1, 2, …, m; j=1, 2, …, p}, m为样品个数, j为拉曼位移数。 分别计算桂花酒矩阵和杨梅酒矩阵的平均光谱矩阵, 命名为S1和S2。 先假设窗口宽度为5, 利用偏最小二乘PLS回归法, 得到转化矩阵F。 杨梅酒验证集15× 1 024矩阵X通过X'=XF关系式得到转化矩阵X'。 根据K/S算法排序结果, 在一个确定窗口宽度5条件下从样本数2依次增加到15进行传递, 选取最佳传递样品个数, 再在最佳样品数量下选择不同的窗口宽度进行传递, 确定最佳窗口宽度, 结果如图6所示。
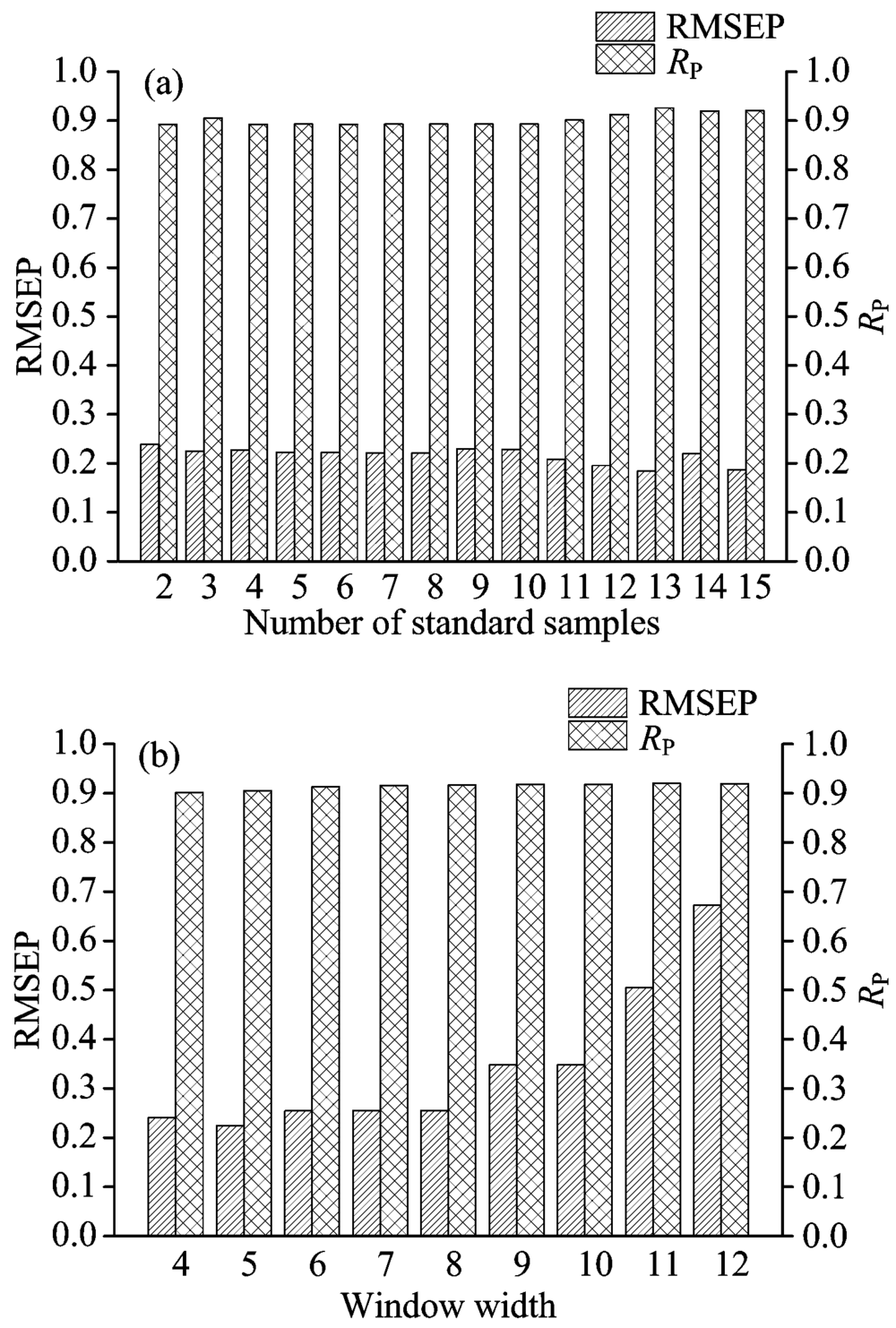 | 图6 杨梅酒验证集光谱经PDS算法模型传递效果 (a): 不同校正集样本数量传递效果; (b): 不同窗口宽度传递效果Fig.6 Model transfer effects for validation set of red bayberry win by PDS (a): Effect of selecting different calibration set samples; (b): Effect of selectingdifferent window width |
当分别选择2~15个样品作为校正集样品时, 结合偏最小二乘回归PLS得到转化矩阵, 每种数量的样品集都选择最佳主因子数进行传递, 如图6(a)所示。 与DS算法相比, 基于PDS算法传递模型验证相关系数和均方根误差, 随着样品数的增加其变化趋势总体较为平缓。 杨梅酒校正样品数量小于3个时, 随着校正集样品数的增加, 验证相关系数从0.892 8上升到0.905 5, 均方根误差由0.238 7 g· kg-1下降到0.225 g· kg-1。 随着校正集样品数继续增加, 验证相关系数和均方根误差变化十分平稳, 当杨梅酒校正样品数量为4~10时, 相关系数和均方根误差分别在0.892 8~0.892 9和0.220 8~0.229 3 g· kg-1范围内浮动。 样品数为11~15时, 传递模型验证相关系数总体稍有增加, 均方根误差也有些降低, 分别在0.901 2~0.925 9和0.187 3~0.219 8 g· kg-1范围内浮动。 根据选取少量样品来修正传递模型原则, 基于PDS算法传递模型时选取最佳样品数为3, 其验证相关系数和均方根误差分别为0.905 5和0.225 g· kg-1。
选取最佳样品数为3时, 分别在不同窗口宽度下的传递模型结果如图6(b)所示。 随着窗口宽度的增加, 传递模型RP值在0.9015~0.9211变化趋于平稳, 但RMSEP值随着窗口宽度的增加先减小而后明显增加趋势。 窗口宽度和校正样品数量一样直接影响传递效果, 但窗口宽度的选择并非越大越好, 当窗口宽度较大时, 因其包含过多无关信息而导致过校正的较差传递效果, 当窗口宽度较小时会遗漏部分差异信息而导致转化矩阵不能包含全部校正信息[2]。 当窗口宽度为5时达到最好的预测效果, 其RP值和RMSEP值分别为0.905 5和0.225 g· kg-1。
2.2.3 向杨梅酒传递桂花酒主光谱模型结果比较
基于DS算法向杨梅酒传递桂花酒主光谱模型传递验证结果如图7(a)所示, 选取的最佳样品数为4个, RP和RMSEP值分别为0.906 1和0.215 0 g· kg-1。 基于PDS算法选择最佳样品数3, 选取的窗口宽度为5, 传递模型验证结果如图7(b)所示, RP和RMSEP值分别为0.905 5和0.225 0 g· kg-1。 结果表明, 利用DS算法向杨梅酒传递桂花酒主光谱模型验证结果稍优于PDS算法传递结果, 但两种方法传递效果比较相近。 从而得出, DS算法和PDS算法均可以将桂花酒中山梨酸钾主光谱模型有效传递给杨梅酒。
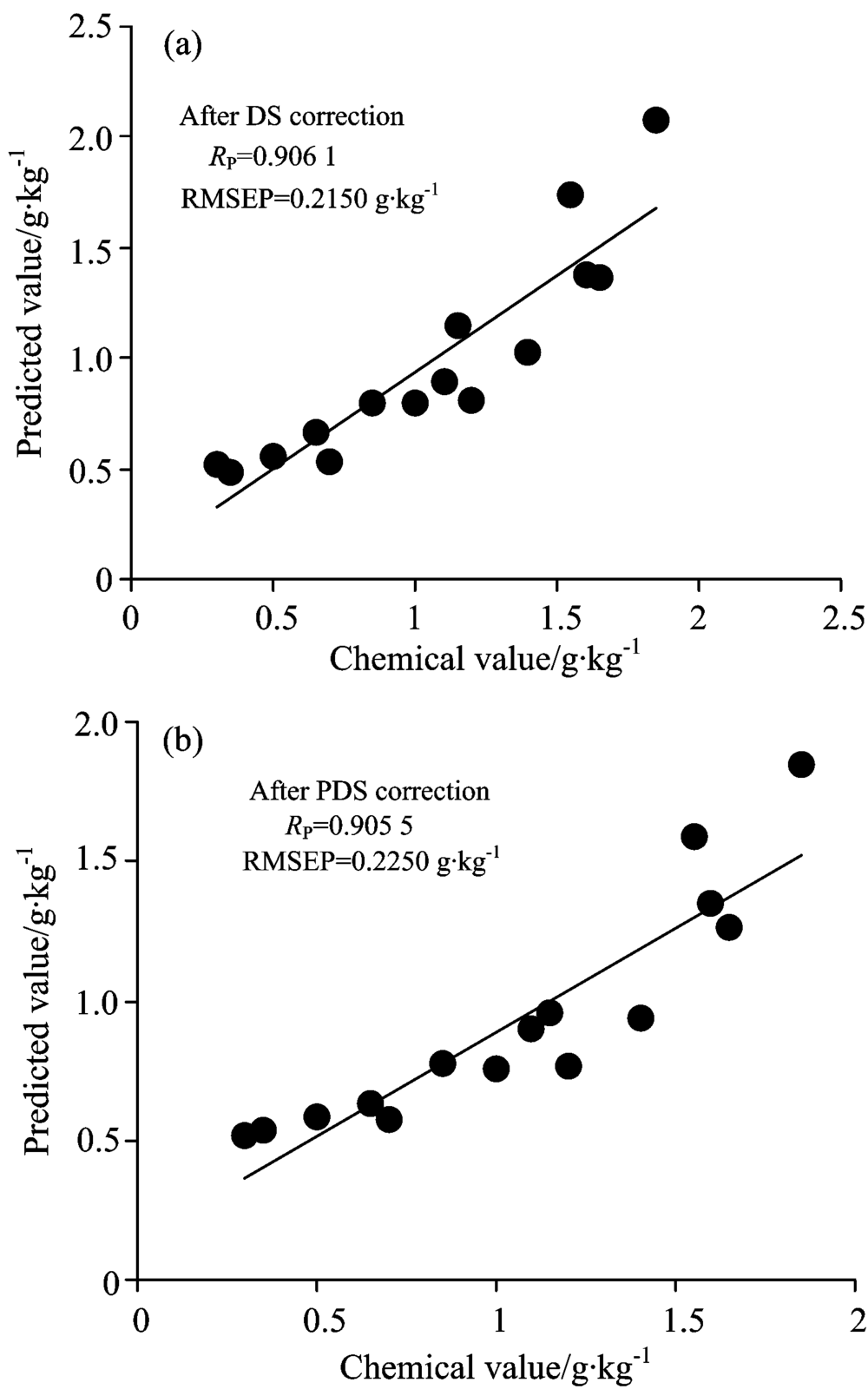 | 图7 两种算法模型传递效果 (a): DS算法的传递效果; (b): PDS算法的传递效果Fig.7 Model transfer effect diagram (a): Effect of DS algorithm; (b): Effect of PDS algorithm |
自行搭建的拉曼光谱点扫描系统, 以柠檬酸钠还原法配制的SC银溶胶为表面增强剂, 建立了一种桂花酒中山梨酸钾的定量预测模型, 模型校正集决定系数(
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|