


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于火星巡视器车载激光诱导击穿光谱仪系统设计米散射激光雷达可行性研究
[洪光烈1  , 周艳波
, 周艳波1, 2 , 刘豪1 , 孔伟1 , 舒嵘1, 2, * ]
, 周艳波]
|
|


作者简介: 洪光烈, 1966年生, 中国科学院上海技术物理研究所研究员 e-mail: glhong@mail.sitp.ac.cn
火星大气气溶胶的地基探测对研究火星大气环境具有重要意义, 为了能够在节约火星巡视器/着陆器体积、 重量的条件下进行气溶胶探测, 论证了基于巡视器车载激光诱导击穿光谱仪系统设计米散射激光雷达方案的可行性。 所设计的米散射激光雷达系统使用巡视器车载激光诱导击穿光谱仪的既有硬件资源, 加入分光元件和探测器模块, 构成与激光诱导击穿光谱仪系统集成的米散射激光雷达, 米散射激光雷达与激光诱导击穿光谱仪在火星地表分时工作, 互不影响。 为了论证所设计的米散射激光雷达的探测性能, 对Phoenix火星探测任务中独立的米散射激光雷达得到的一组原始回波信号数据进行了处理, 反演得到一组典型火星大气消光系数廓线, 结合消光系数廓线与系统硬件参数计算了所设计的米散射激光雷达的回波信噪比, 结果表明该系统在所用原始数据被记录的当日在火星大气边界层顶4 km高度处信噪比达到26 dB, 在10 km高度附近下降到0 dB, 说明基于火星巡视器车载激光诱导击穿光谱仪系统设计米散射激光雷达进行气溶胶探测具有现实可行性。 对比Phoenix的独立米散射激光雷达设计方案, 基于激光诱导击穿光谱仪的米散射激光雷达不但能够节省巡视器体积、 重量, 而且发射能量更高, 回波接收方案更为简单, 数据反演步骤更为简洁。
It has important significance on the investigation of ground-based detection of mars aerosol for study mars atmospheric environment. To perform aerosol detection based on the constraint of saving mars rover’s or lander’s volume and weight, we investigated the feasibility of designing a Mie-Lidar which compacted with rover based Laser Induced Breakdown Spectroscopy (LIBS). Beam splitter parts and detection module, along with rover based LIBS’s hardware, comprised the LIBS based Mie-Lidar, the LIBS and the Mie-Lidar work independently and they didn’t interfere each other. One day’s primitive data collected by Phoenix mission’s lander was processed, and extinction coefficient profile was derived, with this profile and LIBS’s parameter, signal-to-noise ratio (SNR) of the Lidar calculated. The result showed that LIBS based Lidar reached SNR of 25 dB at 4 km height, i.e., top of martian boundary layer, and downgraded to 0 dB around 10 km altitude. Such outcome proved that letting LIBS based Mie-Lidar working on mars is feasible. It is not only volume and wight saving, but simplifies data recovering processess when we detect mars aerosol with LIBS based Mie-Lidar.
引 言
火星大气气溶胶由灰尘和冰云组成, 直接影响作为火星大气运动基本动力源的地表和大气升温速率, 火星大气运动又会反过来影响气溶胶自身的分布, 构建成一种复杂的反馈机制[1], 探测火星大气气溶胶对研究火星大气运动具有重要意义。 此外, 对于近年来世界各国已经发射或将要发射的火星着陆器、 巡视器[2]而言, 大气气溶胶还关系到其每日能收集到的太阳能多少, 进而影响所搭载的多种科学仪器的正常工作。 因此, 持续获得高精度、 高时空分辨率的火星气溶胶分布数据具有现实需求。 对火星大气的探测手段可以分为地基探测和轨道探测两种, 轨道探测器虽然相对容易研制也能提供更好的探测时空尺度, 但通常需要更多模型和反演假设, 地基探测相比轨道探测还能提供更高的准确率和探测精度[3]。 在地基探测中, 多波段光度计只能获取垂直高度上的气溶胶总积分信息, 但是无法得到垂直高度上的气溶胶分布廓线, 作为一种被动遥感手段, 也不能在夜间工作。
米散射激光雷达(mie scattering light detection and ranging, Mie-Lidar)是一种能够以高精度、 高时空分辨率探测大气气溶胶消光系数、 后向散射系数、 光学厚度等的主动探测技术, 不仅在地球上使用普遍, 也被美国Phoenix火星探测任务[4]采用并部署在其火星着陆器上, 成功传回大量原始数据。 然而, Phoenix这种单独部署一套激光雷达专门用于气溶胶探测, 加上太阳光度计校准的做法给着陆器增加了不少体积、 重量和复杂度, 而且其激光雷达发射脉冲能量仅有0.1 mJ, 探测能力有限。 为了在尽量少增加未来火星巡视器/着陆器体积、 重量的前提下还能够探测火星/木卫二的大气气溶胶, 美国NASA兰利研究中心相关课题组研制出基于巡视器/着陆器上的复合光谱仪既有资源进行气溶胶探测的原理样机[5], 用该样机对地球表面0~6 km大气气溶胶进行了探测实验, 但未结合火星/木卫二的大气环境计算其所能达到的实际探测性能。 目前我国国内尚无根据这种设计理念设计的激光雷达报导。
本工作提出一种基于火星巡视器车载激光诱导击穿光谱仪(laser-induced breakdown spectroscopy, LIBS)系统设计米散射激光雷达的方案, 可用于我国未来火星巡视器, 使其搭载的LIBS系统也能够探测大气气溶胶。 本文详细分析了如何获取火星气溶胶消光系数廓线, 对所设计的LIBS-Lidar系统探测气溶胶的理论性能进行了计算。
LIBS是一种以高能量激光脉冲作为激发光源并检测物质原子层面光谱信息的光谱仪, 具有快速和精确量化分析的优点, 其一般包含发射光源、 接收望远镜、 光谱仪、 数据采集电路等部分。 Mie-Lidar是一种用于探测大气气溶胶的较为简单的一种激光雷达, 主要包括发射光源、 接收望远镜、 单元探测器模块和数据采集等部分, 对光源波长选择和频率稳定性等要求不高。 二者在硬件资源使用上有很多相似之处, 二者的发射光源、 接收望远镜、 光路和数据采集电路是可以共用的, 基于此我们提出了一种基于LIBS的米散射激光雷达设计方案。
本系统是一种激光诱导击穿光谱仪与米散射激光雷达的混合系统(LIBS-Lidar), 图1所示为其总体设计框图。 因本系统着眼于火星巡视器应用, 因此LIBS参数参考美国“ 好奇号” 火星车所用ChemCam参数[6], ChemCam是一套以LIBS为核心的火星表面土壤物质分析设备。 表1给出系统主要技术参数。
 | 图1 激光诱导击穿光谱仪与米散射激光雷达混合系统Fig.1 LIBS and Mie-Lidar combined system |
| 表1 基于激光诱导击穿光谱仪的米散射激光雷达系统参数 Table 1 System parameter of LIBS-based Mie-Lidar |
1.2.1 激光发射
系统激光出射部分主要由Nd∶ YAG激光器、 扩束镜和转折反射镜组成, Nd∶ YAG激光器工作波长1 064 nm, 出射光脉冲能量30 mJ, 经过扩束镜和转折透镜出射系统。 扩束镜焦距可调, 由出射光焦距控制电路和相应的光机组件控制出射激光束。 在LIBS工作模式下, 出射激光束会聚在系统前方地面上某位置; 在Lidar工作模式下, 出射激光束会聚在天空无穷远处。
1.2.2 回波接收
在LIBS工作模式下, 回波中除了1 064 nm自身光信号外还有短波长的激光诱导击穿光谱信号[7]以及天空背景光。 经过望远镜的回波光束再用一块离轴抛物面镜准直成平行光, 平行光经过一个小倾角放置的1 064 nm窄带通滤光片(小倾角放置利于保持较窄的透过波长范围), 1 064 nm光信号和少部分天空背景光进入雪崩光电二极管(avalanche photodiode, APD)探测器; 激光诱导击穿光谱信号和天空背景光被窄带滤光片、 转折镜片及另一片离轴抛物面镜反射至光谱仪中。 LIBS工作模式下APD不工作, 1 064 nm光信号最终被摒弃。 进入光谱仪的天空背景光光谱可以通过事先不发射激光脉冲直接接收天空散射光并记录背景光光谱的方式确定, 在分析光谱信息时可以直接减去这部分背景光得到无背景信息的火星表面物质的激光诱导击穿光谱。
在Lidar工作模式下, 调节望远镜次镜与主镜的距离使望远镜能够接收无穷远的回波信号, 此时回波信号中只有1 064 nm光信号和天空背景光信号, 1064nm光信号最终进入APD中被采集而天空背景光则仍然进入光谱仪中, 此时光谱仪不工作, 背景光被摒弃。
1.2.3 本系统与一般LIBS系统的差别
从图1可以看出, 本LIBS-Lidar系统相对于一般LIBS系统增加或改动的部分并不多, 电学部分只是增加一个单元探测器, 光学部分主要是增加了出射、 入射光束会聚控制组件。 LIBS与Lidar不同时工作不会产生相互干扰, 工作模式切换时只需控制光束会聚及开关光谱仪或探测器。
为了对所设计的LIBS-Lidar系统中米散射Lidar的实际工作性能进行评估, 首先需要关于火星大气气溶胶的相关信息, 由于火星气溶胶消光系数比后向散射系数更能准确反映大气含尘率[8], 因此我们需要至少一组火星大气气溶胶消光系数廓线。
迄今为止已经发射并成功探测到火星气溶胶数据的仅有Phoenix的激光雷达[9], 该激光雷达记录了由着陆器上空飘过的火星沙尘和冰云散射的回波信号的高度廓线, 此信号可以用来反演气溶胶消光系数, 而消光系数对理解火星天气气候非常重要。 消光系数与散射物质浓度相关, 可以用于研究火星上的水循环。
在凤凰号成功传回其激光雷达数据后, York大学将回传的激光雷达回波信号数据在互联网上公开以供全球相关研究人员使用[10]。 其回波信号有1 064和532 nm两种成分, 前者由雪崩光电二极管(APD)采集作为数据采集触发信号, 后者由同时工作在模拟探测模式和光子计数模式的光电倍增管(photomultiplier tubes, PMT)探测。 PMT的光子计数模式探测高度高但低空近场信号较强, 存在脉冲堆积效应, 模拟探测模式探测高度低却不存在脉冲堆积效应。 图2显示了Phoenix着陆器着陆后第48火星日532 nm回波信号PMT的两种探测模式探测到的一组原始数据。
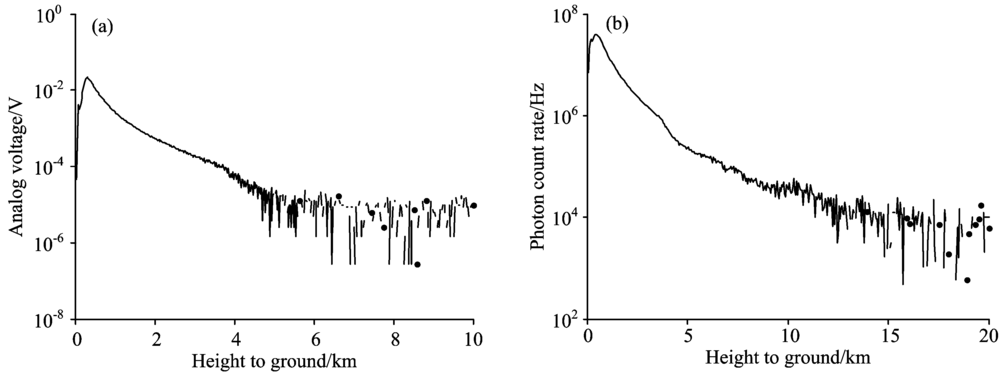 | 图2 Phoenix着陆器米散射激光雷达532 nm通道PMT原始数据 (a): 模拟探测模式; (b): 光子计数模式Fig.2 532 nm PMT’ s raw data of Phoenix lander’ s Mie-Lidar (a): Analog detection mode; (b): Photon counting mode |
米散射激光雷达反演消光系数的方法有Collis方法、 Klett方法和Fernald方法等, Collis方法适用于气溶胶在小高度范围内分布均匀的情况, Klett方法假设气溶胶后向散射系数和消光系数满足指数关系, 当指数项退化为1时成为Fernald方法。 我们采用Fernald方法[11]对模拟探测模式探测到的10 km高度回波信号和光子计数模式探测到的16 km回波信号进行气溶胶消光系数反演, 因火星大气稀薄, 分子散射回波信号相对气溶胶回波信号很弱, 可以忽略分子散射信号[12]。 消光系数对雷达比变化不敏感, 雷达比从20~100 Sr变化时消光系数变动小于3%[8], 反演中假设雷达比为40 Sr, 采用Phoenix的着陆器自带的立体相机(SSI)[13]得到的大气光学厚度(OD)数据作为标定, 即
其中α 为气溶胶消光系数。 由此方法得到的第48火星日气溶胶消光系数廓线如图3所示。 Dickinson等[12]指出这种反演消光系数的标定方法的相对误差估计为6%, 绝对误差为10%。
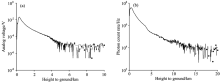
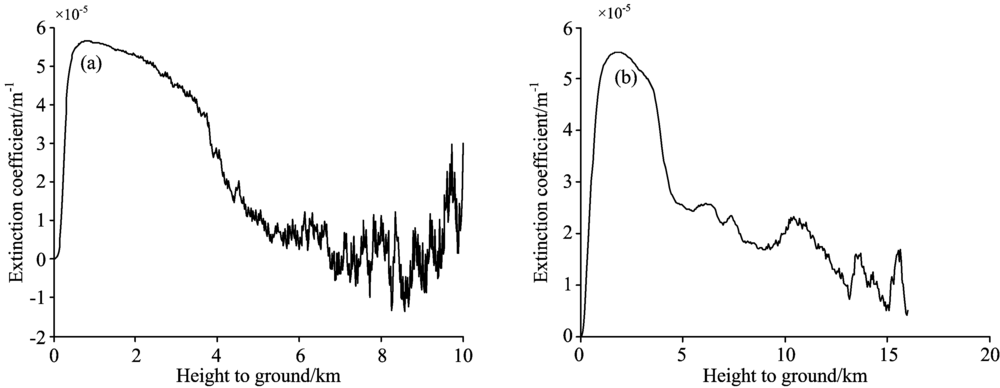 | 图3 PMT原始数据反演的消光系数廓线 (a): 模拟探测模式; (b): 光子计数模式Fig.3 Extinction coefficient derived from PMT’ s raw data (a): Analog detection mode; (b): Photon counting mode |
观察发现, 上面模拟探测模式得到的数据直接反演的消光系数在6 km以上高度噪声过大, 而光子计数模式得到的近场信号本身存在脉冲堆积效应。 可以将低空的模拟探测回波信号与高空的光子计数回波信号进行拼接, 得到准确完整的一定高度范围内的气溶胶消光系数廓线。 Newsom等[14]给出一种用PMT死区时间修正光子计数信号并与APD的模拟信号进行线性拼接的方法, 图4(a)中实线为根据此方法在0~5 km高度拼接的回波信号(虚线为原始的光子计数信号), 其反演的消光系数廓线如图4(b)中实线所示, 图4(b)中的虚线为进一步给出的经过几何重叠因子校正的消光系数廓线, 更能真实反映该日大气气溶胶垂直分布。 几何重叠因子计算方法为绘制ln[X(Z)]廓线, X(Z)=P(Z)× Z2为距离校正的回波信号, 找出ln[X(Z)]在1 km高度以上变化不大且线性度较好的一段做线性拟合, 则几何重叠因子o(Z)
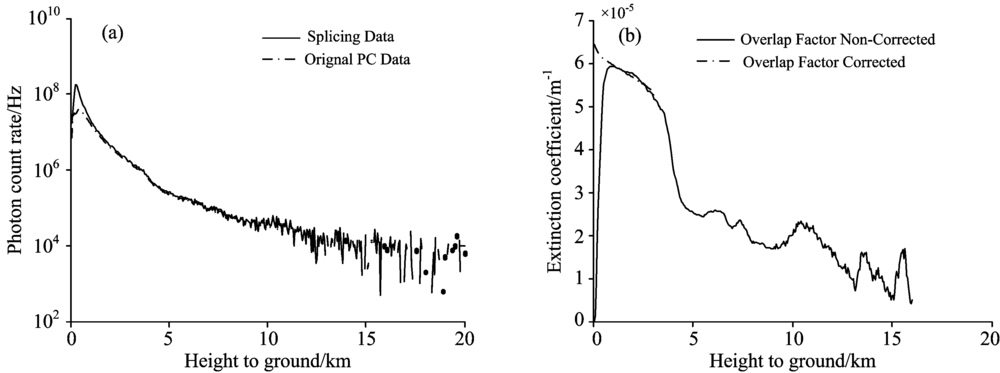 | 图4 PMT两种探测模式的拼接数据及其对应的消光系数廓线 (a): PMT模拟探测模式与光子计数模式的拼接数据; (b): 拼接数据反演的消光系数廓线Fig.4 Slicing data of PMT’ s two detection mode and its corresponding extinction coefficient (a): Splicing data of PMT’ s analog detection mode and photon counting mode; (b): Extinction coefficient derived from splicing data |
对Phoenix的着陆器其它工作日测量到的气溶胶数据进行分析后发现, 第48火星日的气溶胶消光系数廓线并不算很高, 有些火星日的消光系数廓线整体达到该日数据的两倍。 更多日的消光系数廓线与第48日的相差不大, 因此第48日数据具有一定的代表性。 另外对每日的模拟探测数据和光子计数数据进行去背景、 平滑、 标定、 拼接和重叠因子校正过程繁琐, 因此我们只取第48日的数据进行详细分析。
前述反演的消光系数是532 nm波长下的消光系数, 对于其他波长, 需要用Å ngströ m关系外推消光系数
其中Å 为Å ngströ m常数。 Komguem[8]分析Phoenix的着陆器的激光雷达数据后发现, 火星大气边界层内气溶胶在532和1 064 nm这两个波长的消光系数差别很小, 即Å ≈ 0, 表明大气边界层以内气溶胶粒子尺度较大, 这和火星表面活跃的沙尘天气有关; 大气边界层以上Å ≈ 0.24~0.43, 对应粒子直径在1.2~1.4 μ m范围内。 Lemmon[4]分析“ 勇气号” 和“ 机遇号” 火星车上搭载的气溶胶光学厚度测量设备的数据, 也得到了类似的结果。 因此, 所得到的消光系数廓线可以直接用于工作波长为1 064 nm的LIBS-Lidar系统。
不考虑大气分子的散射, 假设激光不存在任何展宽, 即激光脉冲为理想的δ 函数, 则距离激光雷达径向距离r处的回波信号强度R为
其中P0为单脉冲能量, CSYS为系统光学效率, O(r)为重叠因子, c为光速, A为接收望远镜面积, β P(r)为后向散射系数,
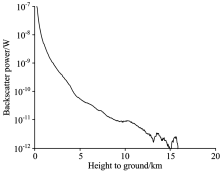
取CSYS=0.1, 重叠因子O(r)=1, β P(r)=α P(r)/SP, 即后向散射系数为消光系数与雷达比之比, 雷达比仍取为40 Sr, 消光系数α P以“ Phonenix” 着陆器第48火星日数据反演的消光系数为样本, 参数见表1, 由此得到回波功率如图5所示。
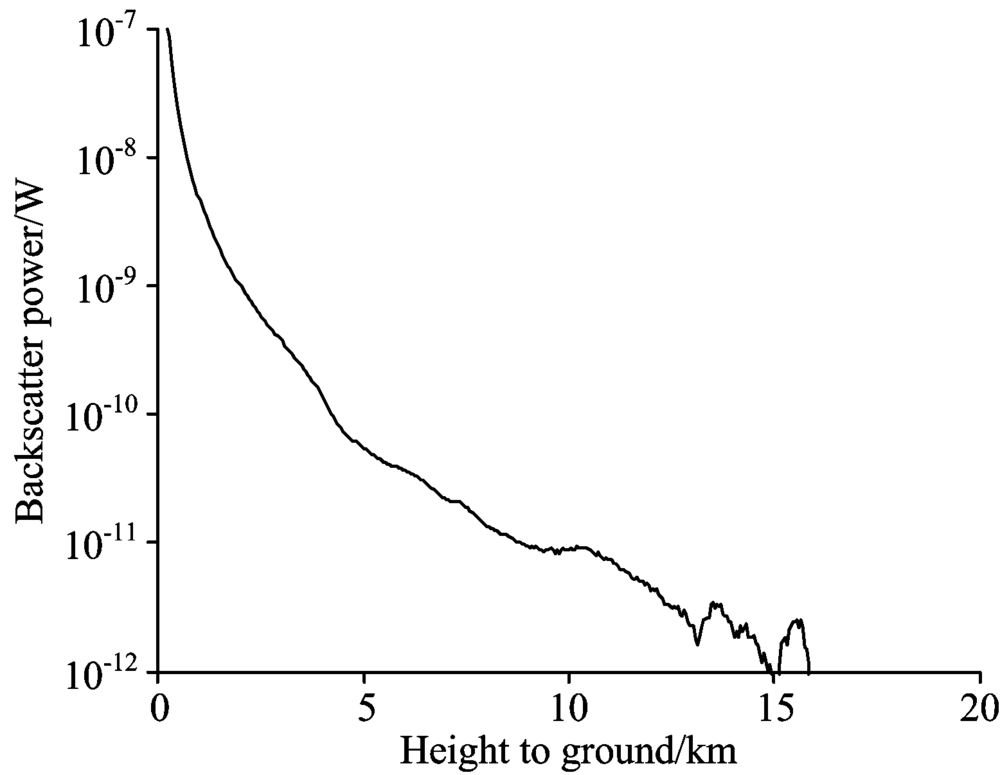 | 图5 米散射激光雷达后向散射回波功率Fig.5 Backscatter power of Mie-Lidar |
由图5可以看出, 以1 064 nm的Nd∶ YAG激光器作为发射光源产生30 mJ出射光脉冲, 回波信号动态范围在10 km高度内达到4个量级, 使用PMT虽然能够达到更大的探测距离, 但是近场的脉冲堆积效应由于发射光能量较高必然显著增大, 而且PMT器件在1 064 nm处量子效率很低, 因此我们选择APD作为探测器。 APD探测器功率信噪比为[15]
式(6)中, M为倍增系数, P为入射光功率, R为特定波长处响应率, q为电荷常量, B为探测器带宽, F(M)为与倍增系数M相关的过剩噪声因子, Ib为体暗电流, Is为表面暗电流, k为玻尔兹曼常量, T为环境温度, B为APD带宽, RL为负载电阻。 式(6)考虑了探测器的散粒噪声和热噪声。
以Excelitas公司的C30659探测器模块为例, 该APD探测器模块包含放大器, 在1 060 nm处的响应率为280 kV· W-1, 100 kHz~50 MHz的输出光谱噪声电压为25 nV· Hz-1/2, 实际可以根据响应率和谱噪声电压大致计算信噪比。 虽然探测器带宽为50 MHz, 但当以20 m为采样空间间隔时采样点信号是133.33 ns宽度的回波对探测器的合作用的结果, 此时探测器只需要5.25 MHz带宽即可采集到该点信号, 我们取7.5 MHz带宽。 更高的空间分辨率意味着更高的探测器带宽的需求, 但这也减小了探测器信噪比。 根据Phonenix的PMT得到的光子计数回波信号估计天空背景光能量在亚纳瓦量级, 这用于计算量子噪声2qBF(M)M2PR。 另外热噪声中的温度以203 K计算, 这是Phoenix的激光雷达所处的热腔温度。
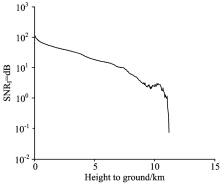
在此用一般的经过累加的电流信噪比SNRI来表征回波信号质量, SNRI=
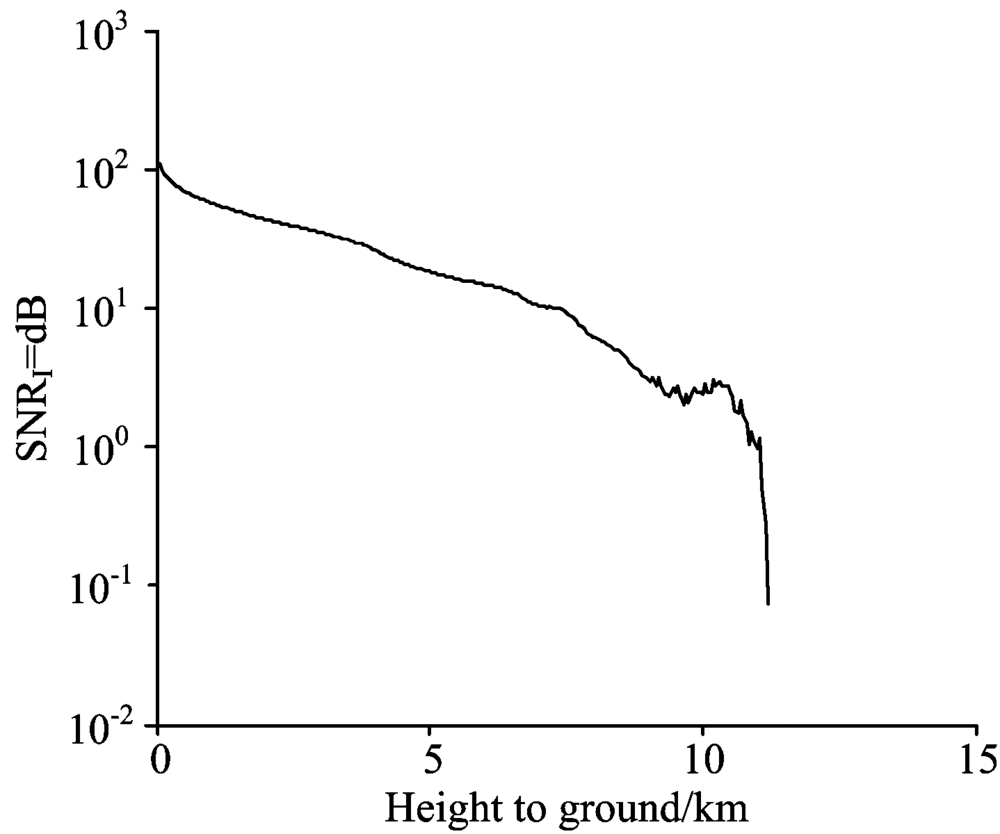 | 图6 电流信噪比Fig.6 Current signal-to-noise ratio |
对比Phoenix的着陆器传回的激光雷达回波数据可以发现, Phoenix的激光雷达回波模拟探测信号早在5 km高度处就几乎只剩下探测器噪声, 对比其光子计数探测数据知道5 km高度处信号光能量应比背景光强很多, 然而模拟探测数据仍然只能看到噪声, 说明模拟探测模式下探测器自身引起的噪声很大, 已然不能有效探测回波。 而我们的LIBS-Lidar系统即使到10 km高度处仍然能在2 048次累加条件下探测到回波信号。 特别注意Phoenix的光子计数数据在反演过程中经过83次累加平均, 因此如果在对所设计的系统的Lidar信号进行处理时也进行m次平均, 那么电流信噪比又将增加
本工作使用的是1 064 nm波长, 如果需要工作在532 nm波长可以加入倍频晶体, 虽然会损失一部分能量, 但532 nm波长信号适合PMT探测, 只是后期数据处理时需要对脉冲堆积效应的影响准确评估, 数据反演更加繁琐。
论证了一种基于LIBS系统设计米散射激光雷达的方案可行性, 激光雷达发射光路、 接收光路与LIBS共用, 系统适合于在火星环境下进行气溶胶探测。 详细分析了Phoenix火星探测任务公开的火星气溶胶数据, 对PMT的模拟探测模式和光子计数模式探测到的回波信号进行了拼接, 校正了近场信号的脉冲堆积效应引起的偏差, 得到了一个火星日的气溶胶消光系数廓线。 利用单日的火星气溶胶消光系数廓线与所设计的激光雷达的参数计算了系统信噪比, 结果表明, 利用LIBS-Lidar系统的激光雷达探测火星大气气溶胶, 在使用发射波长1 064 nm, 脉冲能量30 mJ的Nd∶ YAG激光光源时, 能够有效探测到火星地表10 km高度的气溶胶消光系数廓线, 这说明基于LIBS既有资源设计的米散射激光雷达在节省火星着陆器体积、 重量的同时, 能够有效探测火星表面大气气溶胶, 且因为发射能量高, 只用APD探测器就达到较高的探测精度和高度, 避免了远场和近场的数据拼接, 简化了数据反演流程。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|