

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
LIBS-Raman光谱联合水下探测系统及初步试验
[刘春昊 , 郭金家
, 郭金家* , 叶旺全, 刘庆省, 李楠, 郑荣儿]
, 郭金家, 叶旺全, 刘庆省, 李楠, 郑荣儿]
|
|


作者简介: 刘春昊, 1991年生, 中国海洋大学光学光电子实验室博士研究生 e-mail: liuchforever@163.com
水下激光诱导击穿光谱技术(LIBS)和水下激光拉曼光谱技术(Raman)已在深海成功获得应用, 这两种技术探测对象互补、器件类似, 两者联合探测可更好的进行深海研究。 针对此需求研发了一套LIBS-Raman光谱联合水下原位探测原理样机, 整个系统集成于L790 mm×Φ270 mm的舱体内, 在舱体前端有光学窗口和水密插头, 舱体内部主要包括脉冲激光器、光谱仪、 嵌入式计算机和供电转换装置, 甲板控制终端通过水密电缆实现对系统的供电、 控制和数据采集。 该联合系统采用一台双波长脉冲激光器同时作为LIBS和拉曼光谱的激发光源, LIBS采用1 064 nm波长, 拉曼光谱采用532 nm波长。 双波长激光器发出的光束经分光镜分为两路, 经过后向散射光路收集的两路信号分别进入两个小型光纤光谱仪进行分光探测, LIBS采用AvaSpec-ULS2048光谱仪, 拉曼光谱采用QE 65000光谱仪。 利用搭建的原理样机在青岛近海进行水下原位探测, 在实验室开展了水中固体靶的探测, 实验结果证明了LIBS-Raman联合光谱探测装置的可行性。 下一步将优化系统并开展深海探测应用。
Underwater laser-induced breakdown spectroscopy (LIBS) and underwater laser Raman spectroscopy have been successfully applied in deep sea research. These two technologies have similar devices and complementary detecting targets. The combination of these two technologies is expected to be an improvement for deep-sea study. In this paper, a prototype of a combined underwater LIBS-Raman detection system was developed. The whole system was integrated into a pressure housing of L790 mm×Φ270 mm with two optical windows and water proof connector at the end cap. The underwater pressure vessel connected the deck control terminal with a water proof cable, through which power supply, system control, and signal delivery were provided. The main components inside the pressure vessel included a pulsed laser, two spectrometers, an embedded computer and power supply conversion devices. A dual-wavelength pulsed laser was used as the same excitation source for both LIBS and Raman spectroscopy. The 1 064 nm wavelength was used for LIBS excitation and the 532 nm wavelength was used for Raman spectroscopy excitation. The laser was split into two paths based on wavelength and illuminate to sample through different quartz window. The produced LIBS and Raman signals were collected by back-scattering optical set-up and coupled into the AvaSpec-ULS2048 and QE65000 optical fiber spectrometer respectively. Experiments have been carried out with calcite samples in laboratory, and the results showed LIBS and Raman spectra could be obtained simultaneously for solid samples. Field experiments were also carried out at the Qingdao coast, and the results proved the feasibility of developing a combined LIBS-Raman system for underwater detection. It is hoped that this prototype could be used in hydrothermal area detection in the near future after further optimization.
水下原位探测技术对于深海研究、 尤其是极端海洋环境的研究具有特别重要的作用, 对于像热液流体、 深海冷泉等极端环境的样品来讲, 取样和减压过程往往会导致其化学特性的改变, 难以保证分析数据的准确性和真实性。 目前在深海极端环境原位探测中应用的化学传感器大多需要接触式或者进样测量。 光谱技术具有多参数、 多相态、 无接触探测的特点, 在近年深海原位探测技术中引起关注并获得快速发展, 激光诱导击穿光谱技术(laser induced breakdown spectroscopy, LIBS) 和拉曼光谱技术(Raman spectroscopy)则是其中的代表。
在拉曼光谱深海原位探测方面, 自从2004年第一台深海拉曼光谱系统DORISS[1]部署成功以来, 拉曼光谱被广泛的应用到天然气水合物调查[2]、 海底热液[3]、 海底冷泉[4]以及水下矿石的原位探测[5]。 中国海洋大学2007年开始深海原位拉曼光谱系统DOCARS(Deep Ocean Compact Autonomous Raman Spectrometer)的研制工作, 2009年成功进行了4 000 m深海试验[6]。 “ 十二五” 期间, 研制完成了基于观测网和基于ROV的深海拉曼光谱系统并成功进行海试。 中国科学院海洋研究所也研制了一套深海拉曼光谱系统, 并成功应用于深海热液冷泉探测[7]。
在LIBS深海探测技术方面, 美国Woods Hole 海洋研究所和中国海洋大学对深海压力作用下的LIBS信号进行了实验室模拟测试, 研究了海洋压力下各种激发和探测参数对LIBS信号的影响。 2010年西班牙的马拉加大学(University of Malaga)研制了一套可用于浅海海底考古发掘的水下LIBS系统[8], 该系统采用手持式的光纤探头由潜水员携带至水下进行探测, 目前该系统已经成功应用于水下考古探测。 2012年日本京都大学报道了世界上首台深海LIBS原理样机, 该样机搭载JAMSTEC水下潜器(Hyper-Dolphin)在水下200 m进行了初步现场实验验证[9]。 2015年日本报道了升级后的深海LIBS系统ChemiCam, 该系统搭载ROV成功进行水下1 000 m试验[10]。 2015年中国海洋大学研制的深海LIBS水下原位探测系统(LIBSea)搭载“ 发现号” ROV成功进行了2 000 m深海试验。
拉曼光谱可用于具有拉曼活性的水下阴离子和有机分子探测, LIBS技术可对水中的金属阳离子和金属元素进行分析, 由于两者探测对象互补、 探测所需要的器件类似, 因此如果将两者有机结合起来, 将可同时获得更多、 更全的水中化学成分信息。
目前LIBS-Raman光谱联合探测成功的先例大部分集中于太空探测领域。 美国夏威夷大学为太空着陆器(Lander)设计建立的LIBS-Raman光谱联合探测系统, 成功实现了远程拉曼光谱和LIBS光谱探测[11]。 欧空局在火星计划探测器中也设计了一套LIBS-Raman光谱联合探测系统[12]。 四川大学在第九届中国西部国际科学仪器展览会上, 展出一款LIBS-Raman光谱联合分析仪(LIBRAS)。 面向海洋应用的LIBS-Raman光谱联合探测的实验研究报道较少。 中国海洋大学在实验室开展了Na2SO4溶液LIBS-Raman联合探测研究, 成功探测到钠元素的等离子体信号以及硫酸根离子的拉曼散射信号[13]。 在此基础上, 我们研制了一套可用于水下原位测量的LIBS-Raman原理样机, 并开展了实验室和近海测试。
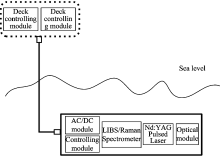
整个LIBS-Raman光谱联合水下原位探测系统如图1所示, 系统由甲板控制和水下探测舱两部分构成。 水上甲板控制部分由供电系统和计算机终端组成; 水下探测舱内主要包括激光器、 光学模块、 LIBS/Raman光谱仪、 控制模块(PC-104)和供电模块。 一台双波长脉冲激光器同时作为LIBS光谱和拉曼光谱的激发光源, LIBS采用1 064 nm波长, 拉曼光谱采用532 nm波长。 LIBS信号和拉曼光谱信号分别采用爱万提斯公司的AvaSpec-ULS2048和海洋光学公司的QE 65000光纤光谱仪进行分光探测。 控制模块采用PC-104嵌入式单板电脑, 系统采用双路输出电源对激光器、 光谱仪与PC-104进行供电。 系统水下部分整体集成在L790 mm× Φ 270 mm的铝合金密封舱内。 系统指标如表1所示。
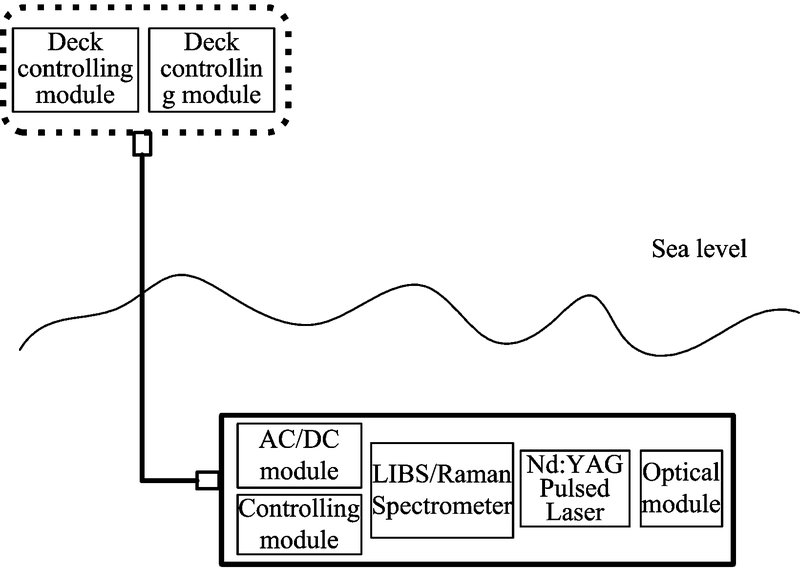 | 图1 LIBS-Raman联合光谱水下原位探测系统结构框图Fig.1 Schematic diagram of underwater combined LIBS-Raman spectroscopy system |
| 表1 LIBS-Raman联合光谱水下原位探测系统技术指标 Table 1 Specification of underwater combined LIBS-Raman spectroscopy system |
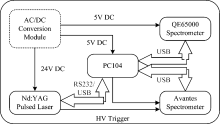
联合系统的供电由甲板提供220 V交流电, 甲板交流电通过Subconn公司的8芯水密电缆传输至水下联合探测系统, 系统水下密封舱内采用AC-DC双路开关电源实现交直流转换, 输出电压为24和5 V直流电, 24 V直流电对脉冲激光器供电, 5 V直流电对PC-104嵌入式计算机和QE 65000拉曼光谱仪供电, LIBS探测光谱仪供电由嵌入式计算机USB接口供电。
当甲板电源对系统开始供电后, 舱内的嵌入式计算机会自动启动, 通过甲板上位机终端的远程桌面实现对水下密封舱内嵌入式计算机的控制。 通过控制嵌入式计算机上的软件开启激光器和光谱仪设置参数。 激光器参数包括能量、 脉冲频率、 触发延时等, 对于LIBS探测光谱仪, 需要对Avantes光谱仪的门宽、 延时进行相应的设置, 以获得较好的光谱。 Avantes光谱仪的触发延时通过激光器和光谱仪配合控制, 光谱仪最小延时1.28 μ s, 激光器输出触发信号给Avantes光谱仪, 同时根据需要设置触发信号相对于激光脉冲的提前时间, 提前时间在0.8~4.4 μ s范围内连续可调。 对拉曼探测光谱仪, 通常需要设置致冷温度和曝光时间。 拉曼探测采用长时间曝光模式。
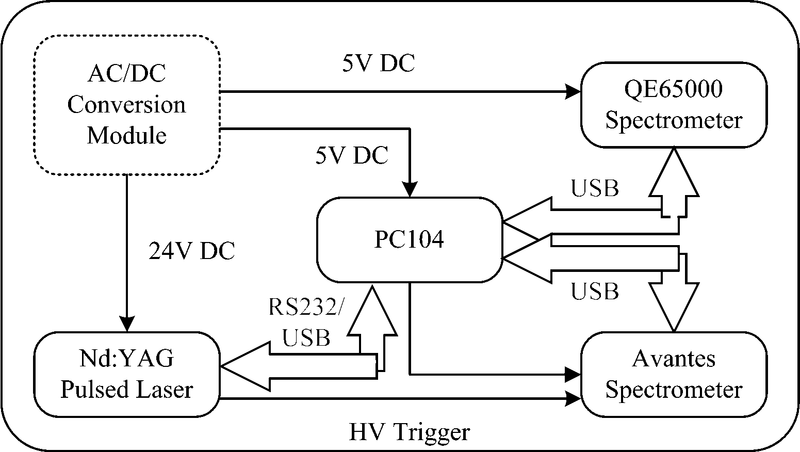 | 图2 LIBS-Raman联合光谱水下原位探测系统供电控制图Fig.2 Power supply module and controlling schematic diagram of the combined LIBS- Raman spectroscopy system |
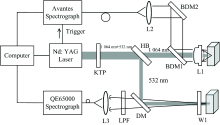
水下联合探测系统的光路根据拉曼和LIBS的不同探测需求分为两路, 如图3所示。
 | 图3 LIBS-Raman联合光谱探测光路图 KTP: 倍频晶体; HB: 激光分光镜; BDM: 宽带反射镜; DM: 二向色镜; LPF长通滤光片; L: 透镜; W: 光学窗口Fig.3 Optical construction of the combined LIBS-Raman spectroscopy system KTP: Frequency doubling crystal; HB: Harmonic beamsplitters; BDM: Broadband dielectric mirrors; DM: Dichroic mirror; LPF: Longpass filter; L: Lens; W: Optical window |
在激光器前放置一个倍频晶体, 出射的1 064 nm激光部分转换为532 nm波长激光, 1 064与532 nm混合光经过Nd∶ YAG谐波分束镜后, 532 nm激光反射用于拉曼光谱激发, 1 064 nm激光透射用于LIBS探测。 1 064 nm激光穿过400~800 nm宽带反射镜BDM1经透镜窗口L1后聚焦于样品, 使击穿产生等离子体; 等离子体的信号光由后向散射光路收集, 经会聚透镜L1后变成平行光, 再由宽带反射镜BDM1和BDM2反射后, 由透镜组L2耦合进入光纤, 再进入AvaSpec-ULS2048光纤光谱仪分光探测。 经过谐波分束镜的532 nm激光由二向色镜反射经过光学窗口W1照射到样品上, 激光作用于样品产生的拉曼信号由透镜L3收集耦合进入光纤, 然后导入到QE 65000光纤光谱仪分光探测。
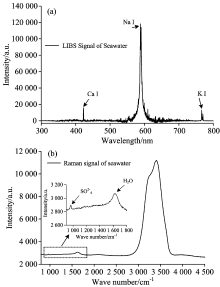
为验证系统性能, 在实验室和青岛近海对海水样品进行了测试。 图4为LIBS-Raman光谱联合探测系统现场试验照片。 试验时将联合探测系统吊放在靠近海底位置, 现场水深约20 m。 图5(a)为1 064 nm激光激发得到海水的LIBS光谱, 延时设置为450 ns, 门宽为1 ms; 图5(b)为532 nm激光激发得到的近海海水的拉曼光谱, 积分时间30 s。 从图5(a)可以清晰地看到Ca Ⅰ 422 nm, Na Ⅰ 589 nm和K Ⅰ 766 nm, K Ⅰ 769 nm特征谱线。 从图5(b)可以清楚地看到981 cm-1处的硫酸根拉曼峰和1 640和3 420 cm-1 处水的拉曼峰。 这些实验结果与实验室的水下拉曼光谱系统和LIBS系统获得的结果类似。 拉曼光谱由于采用脉冲光激发, 为了避免击穿产生LIBS信号的影响, 前端没有进行聚焦, 采用L3收集, 收集立体角较小, 与之前的拉曼光谱系统相比, 灵敏度有所降低。
 | 图4 水下LIBS-Raman联合探测系统现场照片Fig.4 In-situ working picture of underwater combined LIBS-Raman spectroscopy system |
进一步对LIBS-Raman光谱联合系统固体探测进行了测试, 由于水中固体探测对焦点位置要求严格, 实际现场测试需要ROV机械手配合, 限于试验条件, 仅在实验室进行了验证。 采用方解石作为样品进行测试, 图6(a)为1 064 nm激光激发得到水下方解石的LIBS光谱, 从激光脉冲的延时设置为450 ns, 门宽为1 ms; 图6(b)为532 nm激光激发得到的水下方解石的拉曼光谱, 积分时间10 s。 从图5(a)可以清晰地看到Al Ⅰ (393和396 nm), Ca Ⅰ (422 nm等), Na Ⅰ (588和589 nm), K Ⅰ (766和769 nm)原子特征谱线, 同时也获得了CaOH和CaO的分子谱线。 从图6(b)可以清楚地看到方解石的C
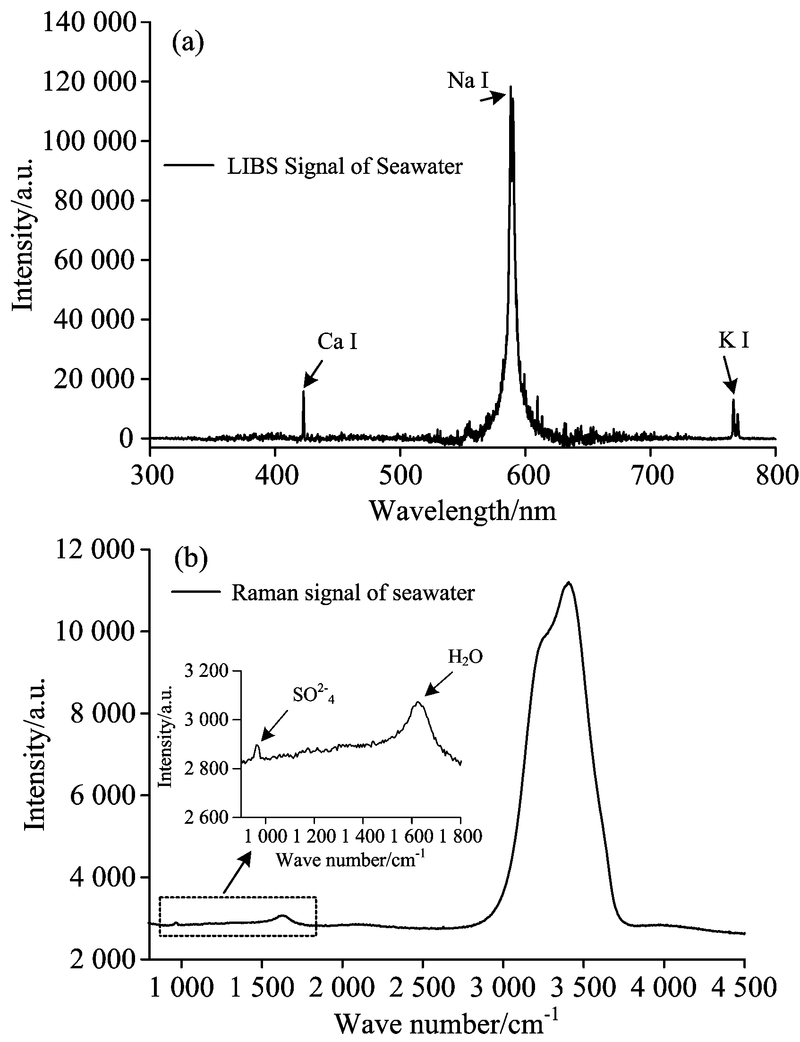 | 图5 青岛近海LIBS光谱和拉曼光谱信号 (a): 1 064 nm激光激发获得的LIBS光谱; (b): 532 nm激光激发获得的拉曼光谱Fig.5 In-situ LIBS spectrum and Raman spectrum of seawater in Qingdao nearshore collected by the combined LIBS-Raman spectroscopy system (a): LIBS spectrum excited by 1 064 nm laser; (b): Raman spectrum excited by 532 nm laser |
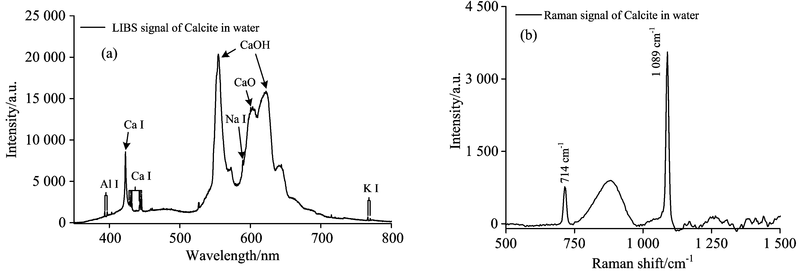 | 图6 水中方解石LIBS光谱和拉曼光谱信号 (a): 1 064 nm激光激发获得的LIBS光谱; (b): 532 nm激光激发获得的拉曼光谱Fig.6 LIBS spectrum and Raman spectrum of the Calcite in water got by the combined LIBS-Raman spectroscopy system (a): LIBS spectrum excited by 1 064 nm laser; (b): Raman spectrum excited by 532 nm laser |
针对水下原位LIBS-Raman光谱联合探测需求, 搭建了一套LIBS-Raman联合光谱探测原理样机并进行了验证实验。 该样机长790 mm, 直径270 mm, 在甲板通过水密电缆进行供电与通讯。 内部利用一台双波长脉冲激光器同时作为LIBS光谱和拉曼光谱的激发光源。 LIBS光谱采用1 064 nm波长, 拉曼光谱采用532 nm波长。 双波长激光器发出的光束经分光镜分为两路, 经过后向散射光路收集的两路信号分别进入两个小型光纤光谱仪分光探测。 利用该样机在青岛近海开展现场试验, 获得了海水中硫酸根拉曼光谱和可溶性有机物(CDOM)荧光光谱, 实验结果证明了LIBS-Raman联合光谱探测系统的可行性。 另外在实验室对水中的固体进行初步试验, 成功获得方解石的主要元素的等离子体光谱和碳酸根基团的拉曼光谱, 下一步将对系统的拉曼光路进行优化, 并搭载深海ROV进行深海原位测试。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|